
في السنوات العشرين الماضية ، تطورت أنظمة الجر كثيرًا. لكن اليوم ، لا يكفي نقل أو تقييد حركة العجلة. توزيعها بكفاءة وحذر هو شعار.
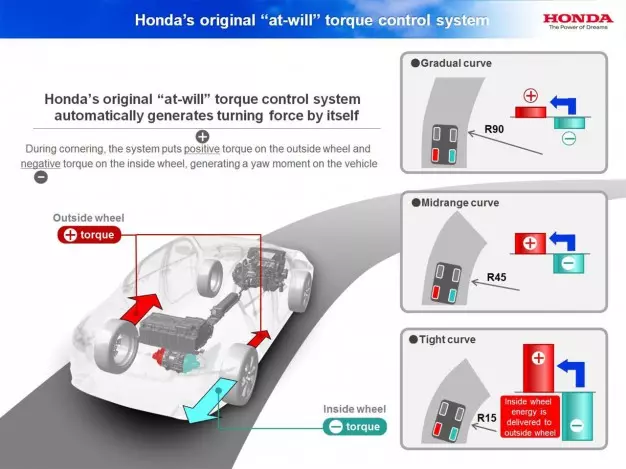
فكرة أنظمة اتجاه ثنائي إنه لمنح كل عجلة القوة التي تحتاجها بالضبط ، في الوقت المثالي لأداء فعال. لا يمكن أن يكون المفهوم أبسط ولكنه معقد للغاية نظرًا للتعقيد الإلكتروني للأنظمة التي تتكون منه.
كيف يعمل التوجيه الثنائي؟
لا يعد توجيه عزم الدوران أكثر من مساعدة إلكترونية تتمثل مهمتها في مراقبة الطاقة وتوزيعها على العجلات ، مع مراعاة المتغيرات مثل تغيير التروس وزاوية التوجيه ونسبة الانجراف وقوى G وغيرها من المعلومات الواردة من المستشعرات التي يتم مشاركتها أيضًا بواسطة ESP ووحدات التحكم في الجر.يتم تحليل المعلومات في أجزاء من الثانية ، مما يسمح لنظام توجيه عزم الدوران بإرسال وإدارة عزم الدوران تلقائيًا بدقة وفي جزء واحد فقط من مائة من الثانية ، مما يجعل السيارة تدور بشكل أسرع. ولكن ليس فقط اعتمادًا على النظام الحركي ، فإن تعقيد عمل نظام التوجيه الثنائي يختلف في وظائفه.
تستفيد أحدث أنظمة توجيه عزم الدوران من المعلومات الواردة من مستشعرات ABS و ESP (التي تقيس السرعة الفردية لكل عجلة) ويعتمد أسلوب تشغيلها قبل كل شيء على نوع الجر الذي تتمتع به السيارة.
في سيارات الدفع الأمامي
تم دمج نظام توجيه عزم الدوران في التحكم في الجر ، أي أن التوزيع غير المتماثل لعزم الدوران يأخذ في الاعتبار جميع المعلمات المذكورة ولكنه في النهاية يعمل فقط عندما يعمل التحكم في الجر أيضًا ، مما يجعل جزءًا من محاكاة القفل ، كما لو كان تفاضل ذاتي الغلق.
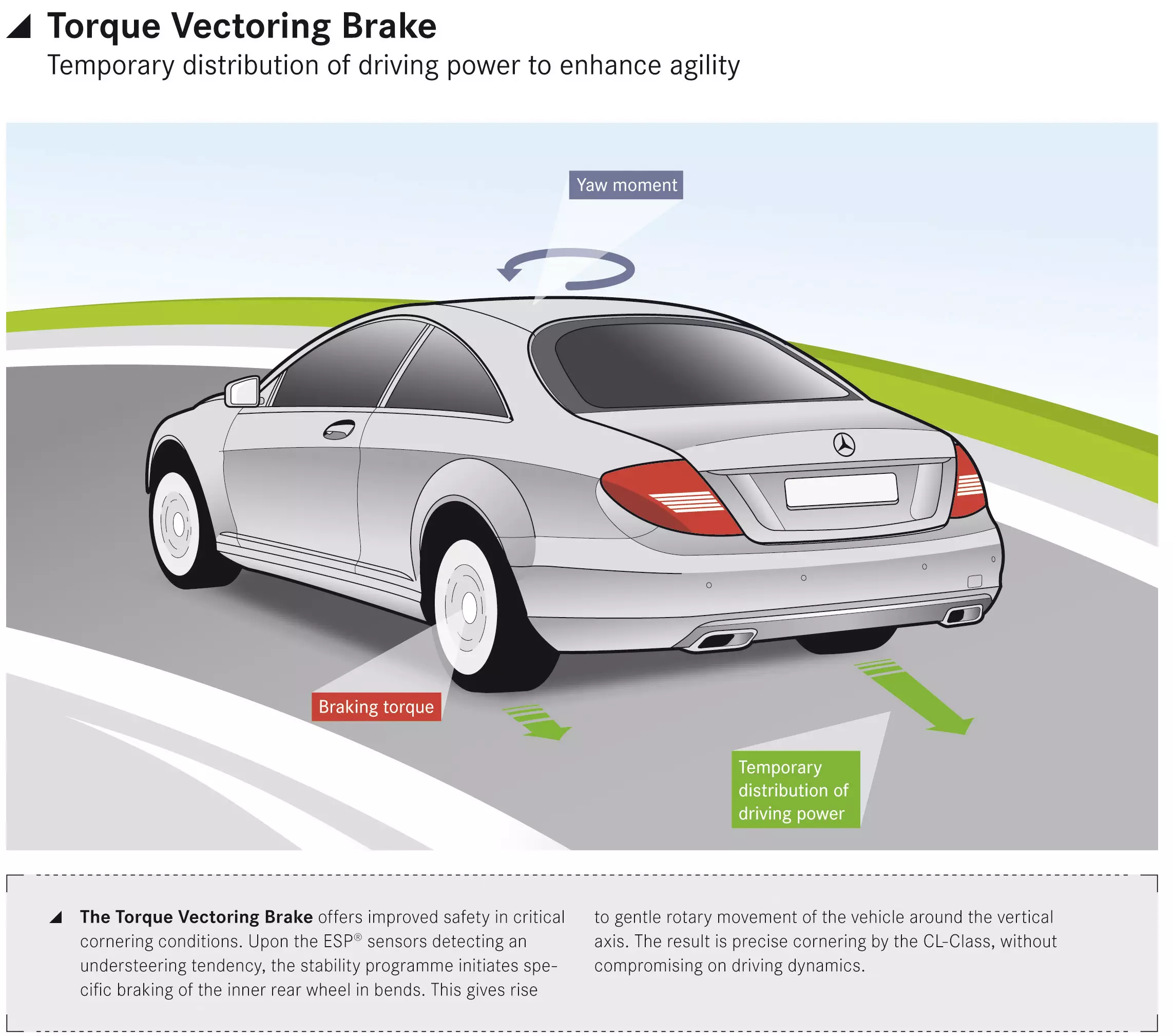
عندما تزداد السرعة ، يستخدم النظام معلمات ESP لتقييم معلمات ثبات السيارة ، مما يجعل ESP يتدخل على مستوى الفرامل بشكل مستقل إذا كان ذلك مبررًا.
في سيارات الدفع الخلفي
يعمل نظام التوجيه جزئيًا بالطريقة نفسها ، كما هو الحال في المركبات ذات الدفع بالعجلات الأمامية وفي كلتا الحالتين ، لا تتطلب المركبات ذات أنظمة الدفع بالعجلتين وأنظمة توجيه عزم الدوران تفاضل قفل ، حيث تلعب الفرامل دور الحد من دوران المحرك. عجلة معينة.على مركبات الدفع الرباعي
يختلف تشغيل نظام توجيه عزم الدوران تمامًا عن المركبات ذات عجلتي قيادة فقط. هنا ، يعتمد النظام في المقام الأول على وحدة الدفع الرباعي التي تمثل العقل الرئيسي للعمليات والتي تحكم أداء اتجاه عزم الدوران.
في المركبات ذات الدفع الرباعي ، يعتمد توزيع السحب بين المحاور إما على وسيلة ميكانيكية - تفاضل مركزي - أو إلكترونيًا من خلال قوابض متعددة الأقراص أو حتى كليهما ، مما يجعل النظام نفسه أكثر تعقيدًا.
في معظم سيارات الدفع الرباعي التي تتضمن توجيه عزم الدوران ، تحتوي كل من التفاضلات الأمامية والخلفية على قوابض متعددة الأقراص على كل جانب من المحور المعني بحيث يمكنها تغيير عزم الدوران المطبق. بمعنى آخر ، بالإضافة إلى نظام الدفع الرباعي الذي يدير تقسيم عزم الدوران بين المحاور ، يمكن لنظام توجيه عزم الدوران أيضًا التحكم في توزيع عزم الدوران بين العجلات.
من الناحية العملية ، يمكن أن يختلف نظام الدفع الرباعي بين المحاور ، واعتمادًا على النظام ، من 0 إلى 50٪ ومن 0 إلى 100٪ من عزم الدوران. في حين أن نظام توجيه عزم الدوران قادر على التغيير بشكل مستقل مع توزيع عزم الدوران بين المحاور ، فإن عزم الدوران المطبق على كل عجلة ، على المحور الأمامي هو 50-50٪ وبنسبة من 0 إلى 100٪ للمحور الخلفي.
كل هذا في الوقت الفعلي وفي أجزاء من الثانية ، مما يسمح بإدارة أفضل لنقل عزم الدوران بين المحاور ، مما يساعد على تحقيق قوة جر أفضل ، سواء في الدعم الديناميكي في الزوايا ، سواء على الأسطح منخفضة الإمساك وكل ذلك مع تحسين استهلاك الوقود نظرًا لأن النظام قادر على إدارة الجر في الوقت الفعلي ، وإرسال العزم اللازم بشكل مستمر ومتغير إلى العجلات اللازمة ، دون إهدار موارد الطاقة.
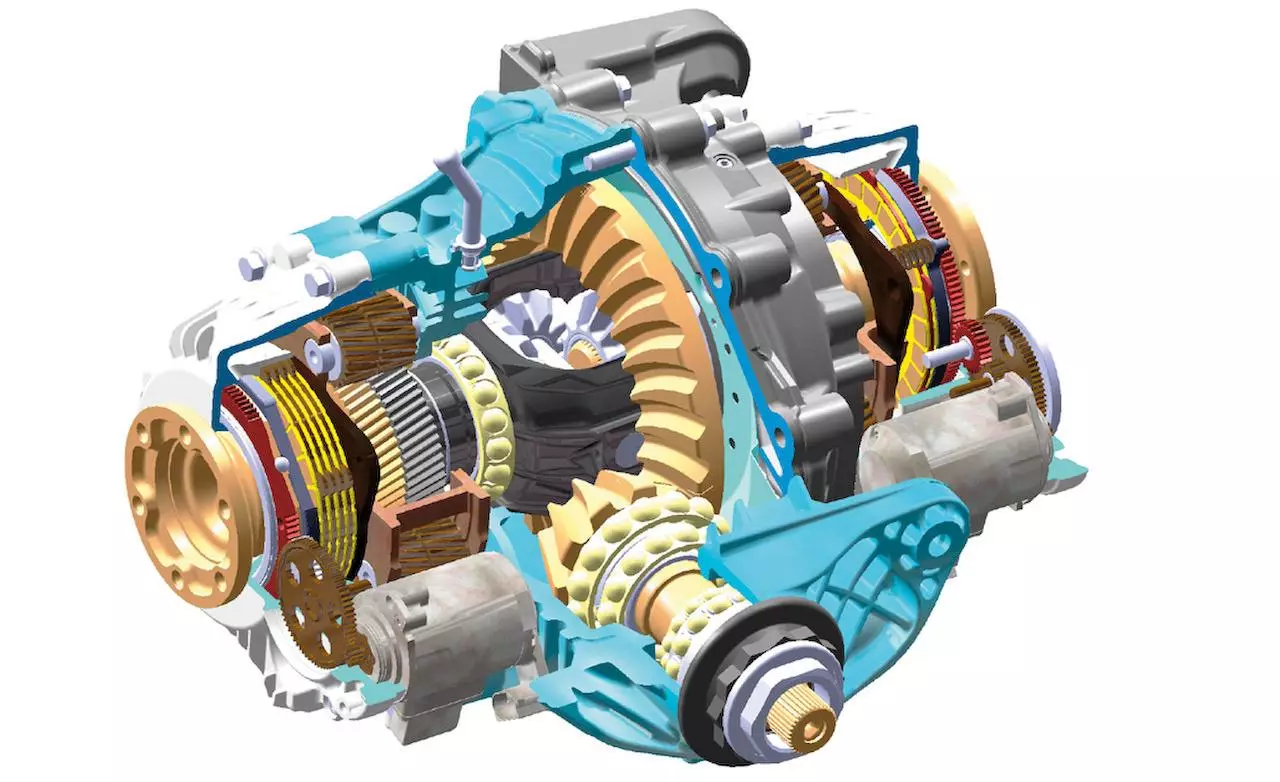
الترس التفاضلي الخلفي مع توجيه عزم الدوران ـ BMW
فوائد في ضوء فروق الحظر الذاتي
مع الابتكارات التكنولوجية الحديثة التي تم إدخالها في أنظمة توجيه عزم الدوران ، أصبحت الفوارق ذاتية القفل أقل استخدامًا ، مع استجابة أقل ، ووزن أكبر للمجموعة ، وعقوبة استهلاك ، وقبل كل شيء الحد من القدرة على القيام بتغيير الجر بين العجلات فقط عندما يكون هناك دوران مفرط لإحدى العجلات مقارنة بالعجلات الأخرى. يجبر الدوران المفرط القابض الداخلي لـ LSD ومجموعة الزنبرك - يحدد الاحتكاك بين هذين المكونين توزيع عزم الدوران بين العجلتين بحيث يدوران في ظروف متساوية.
الأشكال اتجاه ثنائي
يمكن أن تكون فروق الحظر الذاتي من ثلاثة أنواع: طريقة واحدة ، و 1.5 طريقة ، وثنائية الاتجاه. تعمل تفاضلات الانزلاق والقفل إما في تسارع أحادي الاتجاه فقط ، أو تسارع 1.5 اتجاه ونصف تباطؤ ، أو في تسارع وتباطؤ في اتجاهين ، مع ضمان حصول العجلات بشكل هامشي على 50٪ من الجر ، وبالتالي منع زيادة السرعة. لإحدى العجلات بدون جر. يمكن أن تعمل أنظمة توجيه عزم الدوران أيضًا على كل من التسارع والتباطؤ ، ولكن مع ميزة التباين أو حتى قطع عزم الدوران الموفر للعجلة مع الدوران الزائد.
عند تسريع المركبات ذات الدفع الثنائي ، يعمل توجيه عزم الدوران على الترس التفاضلي كما لو كان ترسًا تفاضليًا مفتوحًا. يتم توزيع عزم الدوران بشكل متماثل ، ولكن من اللحظة التي توجد فيها اختلافات في الجر أو الدخول في منحنيات مع اختلاف دوران مفرط بين العجلات ، يعمل النظام عن طريق إرسال عزم الدوران إلى العجلة بقوة جر أكبر ، ويعمل جنبًا إلى جنب مع التحكم في الجر و ESP . أثناء التباطؤ ، نظرًا لعدم وجود تفاضل على محور القيادة الآخر ، يكون برنامج الثبات الإلكتروني (ESP) مسؤولاً عن العمل على فرامل العجلات بشكل مستقل ، وإدارة المعلومات المرسلة إليه من جميع المستشعرات.
في أحدث أنظمة الدفع الرباعي ، يلعب نظام توجيه عزم الدوران دورًا أكثر بروزًا ، حيث يعمل جنبًا إلى جنب مع جميع الأنظمة ، ولكن يتم التحكم فيه بواسطة وحدة إدارة الدفع الرباعي المركزية. هذه الوحدة ، بالإضافة إلى إدارة الجر بين المحاور ، تدير أيضًا الطريقة التي يعمل بها توجيه عزم الدوران في كل من التسارع والتباطؤ ، وإرسال عزم الدوران بطريقة مستقلة تمامًا إلى إحدى العجلات ، مع الاعتماد أيضًا على أنظمة التحكم في الجر. و ESP في الحالات القصوى.
عملية PTV على بورش ماكان: