
છેલ્લા વીસ વર્ષોમાં, ટ્રેક્શન સિસ્ટમ્સ ઘણી વિકસિત થઈ છે. પરંતુ આજે, વ્હીલ ચળવળને પ્રસારિત અથવા પ્રતિબંધિત કરવું પૂરતું નથી. તેને કાર્યક્ષમ રીતે વિતરિત કરો અને વિવેકબુદ્ધિ સાથે વોચવર્ડ છે.
ની સિસ્ટમોનો વિચાર દ્વિસંગી વેક્ટરાઇઝેશન કાર્યક્ષમ કામગીરી માટે આદર્શ સમયે, દરેક વ્હીલને તેની જરૂર હોય તેટલી શક્તિ આપવાનું છે. વિભાવના સરળ ન હોઈ શકે પરંતુ તે સમાવિષ્ટ સિસ્ટમ્સની ઇલેક્ટ્રોનિક જટિલતાને જોતાં તે ખૂબ જ જટિલ છે.
બાઈનરી વેક્ટરિંગ કેવી રીતે કામ કરે છે?
ટોર્ક વેક્ટરિંગ એ ઈલેક્ટ્રોનિક સહાય સિવાય બીજું કંઈ નથી, જેનું મિશન વ્હીલ્સ પર દેખરેખ રાખવાનું અને પાવરનું વિતરણ કરવાનું છે, જેમાં ગિયર શિફ્ટ, સ્ટીયરિંગ એંગલ, ડ્રિફ્ટ રેશિયો, જી ફોર્સ અને સેન્સરમાંથી આવતી અન્ય માહિતી જેવા કે ESP દ્વારા પણ શેર કરવામાં આવે છે. અને ટ્રેક્શન કંટ્રોલ મોડ્યુલો.માહિતીનું મિલિસેકંડમાં વિશ્લેષણ કરવામાં આવે છે આમ ટોર્ક વેક્ટરાઇઝેશન સિસ્ટમને આપમેળે મોકલવા અને ચોક્કસ રીતે અને સેકન્ડના માત્ર એક સોમા ભાગમાં, બાહ્ય પાછળના વ્હીલ દ્વારા જરૂરી ટોર્કને સંચાલિત કરવાની મંજૂરી આપે છે, જે કારને વધુ ઝડપી બનાવે છે. પરંતુ માત્ર મોટર સિસ્ટમના આધારે જ નહીં, દ્વિસંગી વેક્ટરાઇઝેશન સિસ્ટમની ક્રિયાની જટિલતા તેના કાર્યોમાં બદલાય છે.
નવીનતમ ટોર્ક વેક્ટરિંગ સિસ્ટમ્સ એબીએસ અને ઇએસપી સેન્સર (જે દરેક વ્હીલની વ્યક્તિગત ગતિને માપે છે) ની માહિતીનો લાભ લે છે અને તેમની કામગીરીનો મોડ સૌથી વધુ વાહનના ટ્રેક્શનના પ્રકાર પર આધાર રાખે છે.
ફ્રન્ટ-વ્હીલ ડ્રાઇવ વાહનોમાં
ટોર્ક વેક્ટરિંગ સિસ્ટમ ટ્રેક્શન કંટ્રોલમાં એકીકૃત છે, એટલે કે, ટોર્કનું અસમપ્રમાણ વિતરણ તમામ ઉલ્લેખિત પરિમાણોને ધ્યાનમાં લે છે પરંતુ આખરે તે માત્ર ત્યારે જ કાર્ય કરે છે જ્યારે ટ્રેક્શન કંટ્રોલ પણ કાર્ય કરે છે, લોકના સિમ્યુલેશનનો ભાગ બનાવે છે, જેમ કે તે સ્વ-લોકીંગ વિભેદક.
જ્યારે ઝડપ વધે છે, ત્યારે સિસ્ટમ કારના સ્થિરતા પરિમાણોનું મૂલ્યાંકન કરવા માટે ESP પરિમાણોનો ઉપયોગ કરે છે, જો તે ન્યાયી હોય તો ESP બ્રેક્સના સ્તરે સ્વતંત્ર રીતે હસ્તક્ષેપ કરે છે.
રીઅર-વ્હીલ ડ્રાઇવ વાહનોમાં
વેક્ટરિંગ સિસ્ટમ આંશિક રીતે તે જ રીતે કામ કરે છે, જેમ કે ફ્રન્ટ-વ્હીલ ડ્રાઇવ વાહનોમાં અને બંને કિસ્સાઓમાં, ટુ-વ્હીલ ડ્રાઇવ સિસ્ટમ્સ અને ટોર્ક વેક્ટરિંગ સિસ્ટમવાળા વાહનોને લોકીંગ ડિફરન્સિયલ્સની જરૂર હોતી નથી, જેમાં બ્રેક્સ પરિભ્રમણને મર્યાદિત કરવાની ભૂમિકા ભજવે છે. આપેલ વ્હીલ.ઓલ-વ્હીલ ડ્રાઇવ વાહનો પર
ટોર્ક વેક્ટરિંગ સિસ્ટમનું સંચાલન માત્ર બે ડ્રાઇવ વ્હીલ્સવાળા વાહનોથી તદ્દન અલગ છે. અહીં, સિસ્ટમ ફોર-વ્હીલ ડ્રાઇવ મોડ્યુલ પર સૌથી વધુ આધાર રાખે છે જે ઓપરેશનનું મગજ છે અને તે ટોર્ક વેક્ટરાઇઝેશનની કામગીરીને આદેશ આપે છે.
ઓલ-વ્હીલ-ડ્રાઈવ વાહનોમાં, એક્સેલ્સ વચ્ચે ટ્રેક્શનનું વિતરણ કાં તો યાંત્રિક માધ્યમ - કેન્દ્રીય વિભેદક - અથવા ઈલેક્ટ્રોનિક રૂપે મલ્ટી-ડિસ્ક ક્લચ દ્વારા અથવા તો બંને પર આધારિત છે, જે સિસ્ટમને વધુ જટિલ બનાવે છે.
મોટાભાગના ઓલ-વ્હીલ-ડ્રાઈવ વાહનોમાં જેમાં ટોર્ક વેક્ટરિંગનો સમાવેશ થાય છે, આગળ અને પાછળના બંને ડિફરન્સિયલ્સ સંબંધિત એક્સેલની દરેક બાજુએ મલ્ટિ-ડિસ્ક ક્લચ ધરાવે છે જેથી તેઓ લાગુ ટોર્કને બદલી શકે. બીજા શબ્દોમાં કહીએ તો, એક્સેલ્સ વચ્ચે ટોર્કના વિભાજનનું સંચાલન કરતી ઓલ-વ્હીલ ડ્રાઇવ સિસ્ટમ ઉપરાંત, ટોર્ક વેક્ટરિંગ સિસ્ટમ વ્હીલ્સ વચ્ચેના ટોર્કના વિતરણને પણ નિયંત્રિત કરી શકે છે.
વ્યવહારમાં, ઑલ-વ્હીલ ડ્રાઇવ સિસ્ટમ એક્સેલ વચ્ચે અને સિસ્ટમના આધારે, 0 થી 50% અને ટોર્કના 0 થી 100% સુધી બદલાઈ શકે છે. જ્યારે ટોર્ક વેક્ટરિંગ સિસ્ટમ એક્સેલ્સ વચ્ચે ટોર્કના વિતરણ સાથે સ્વાયત્ત રીતે બદલાઈ શકે છે, ત્યારે દરેક વ્હીલ પર, આગળના એક્સલ પર 50-50% અને પાછળના એક્સલ માટે 0 થી 100% સુધીના પ્રમાણમાં ટોર્ક લાગુ પડે છે.
આ બધું વાસ્તવિક સમયમાં અને સેકન્ડના અપૂર્ણાંકમાં છે, જે એક્સેલ્સ વચ્ચેના ટોર્કના સ્થાનાંતરણના બહેતર સંચાલનને મંજૂરી આપે છે, બહેતર ટ્રેક્શન પ્રાપ્ત કરવામાં મદદ કરે છે, પછી ભલે તે ખૂણામાં ગતિશીલ સપોર્ટ હોય, ભલે ઓછી પકડવાળી સપાટી પર હોય અને બધુ જ સુધારેલ બળતણ વપરાશ સાથે. , કારણ કે સિસ્ટમ વાસ્તવિક સમયમાં ટ્રેક્શનનું સંચાલન કરવામાં સક્ષમ છે, ઊર્જા સંસાધનોનો બગાડ કર્યા વિના, જરૂરી વ્હીલ્સને સતત અને પરિવર્તનશીલ રીતે જરૂરી ટોર્ક મોકલે છે.
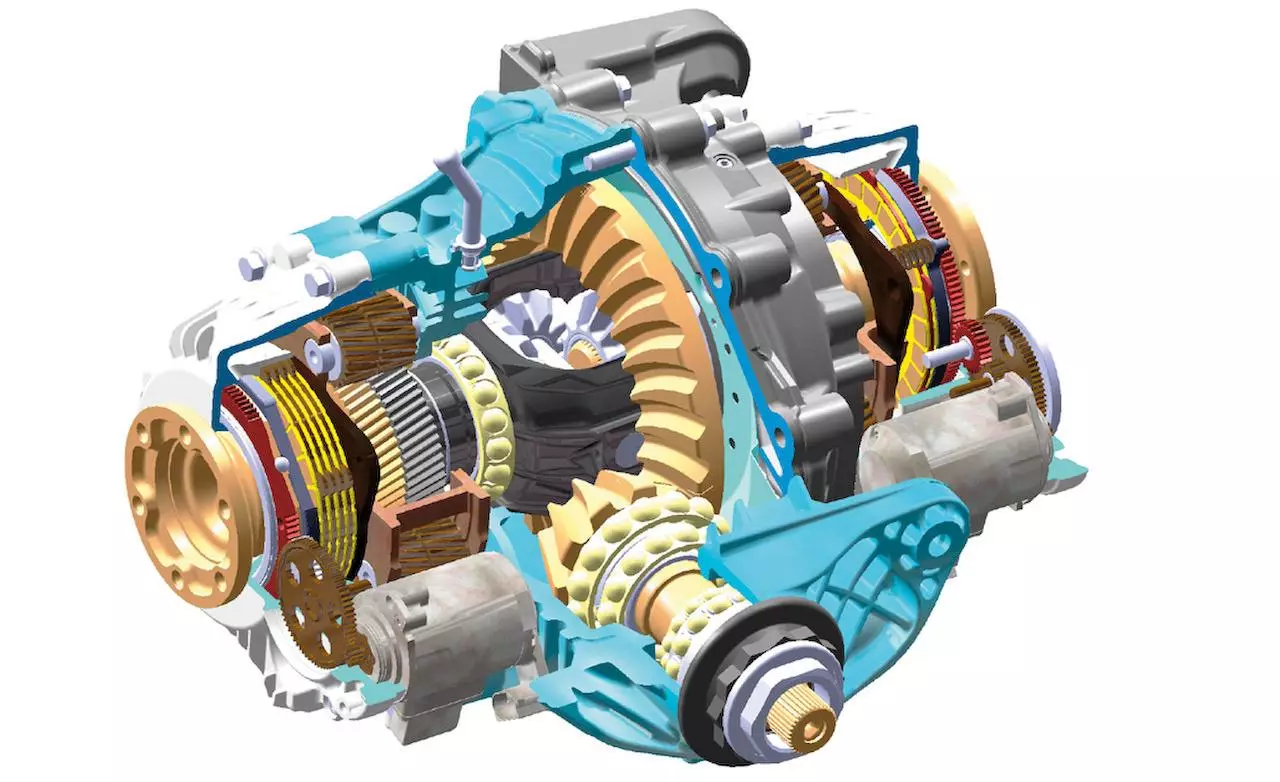
ટોર્ક વેક્ટરિંગ સાથે રીઅર ડિફરન્શિયલ - BMW
લાભો સ્વ-અવરોધિત તફાવતોને ધ્યાનમાં રાખીને
ટોર્ક વેક્ટરિંગ સિસ્ટમ્સમાં તાજેતરના તકનીકી નવીનતાઓ સાથે, ઓછા પ્રતિભાવ સાથે, સેટનું વધુ વજન, વપરાશ દંડ અને સૌથી ઉપર માત્ર વ્હીલ્સ વચ્ચે ટ્રેક્શનની વિવિધતા કરવા સક્ષમ હોવાની મર્યાદાઓ સાથે, સ્વ-લોકીંગ તફાવતો ઓછા અને ઓછા ઉપયોગમાં લેવાતા જાય છે. માત્ર ત્યારે જ જ્યારે એક વ્હીલ બીજાની સરખામણીમાં વધુ પડતું પરિભ્રમણ કરે છે. અતિશય પરિભ્રમણ LSD અને સ્પ્રિંગ સેટના આંતરિક ક્લચને દબાણ કરે છે - આ 2 ઘટકો વચ્ચેનું ઘર્ષણ બે પૈડાં વચ્ચે ટોર્કનું વિતરણ નક્કી કરે છે જેથી કરીને તેઓ સમાન સ્થિતિમાં ફરે.
આકારો દ્વિસંગી વેક્ટરાઇઝેશન
સ્વ-અવરોધિત તફાવતો ત્રણ પ્રકારના હોઈ શકે છે: 1-વે, 1.5-વે અને 2-વે. સ્લિપ-લોક ડિફરન્સિયલ્સ કાં તો માત્ર 1-વે પ્રવેગકમાં, અથવા 1.5-વે પ્રવેગક અને અડધા-ઘટાડામાં અથવા 2-માર્ગીય પ્રવેગક અને મંદીમાં કામ કરે છે, જ્યારે વ્હીલ્સ નજીવા રીતે 50% ટ્રેક્શન મેળવે છે તેની ખાતરી કરે છે, આમ ઓવરસ્પીડિંગને અટકાવે છે. ટ્રેક્શન વગરના એક પૈડાનું. ટોર્ક વેક્ટરિંગ સિસ્ટમ્સ પ્રવેગક અને મંદી બંને પર પણ કાર્ય કરી શકે છે, પરંતુ વધારાના પરિભ્રમણ સાથે વ્હીલને પૂરા પાડવામાં આવતા ટોર્કને અલગ-અલગ અથવા સંપૂર્ણપણે કાપી નાખવાના ફાયદા સાથે.
ટુ-વ્હીલ ડ્રાઇવ વાહનોને વેગ આપવા પર, ટોર્ક વેક્ટરિંગ ડિફરન્સિયલ પર કાર્ય કરે છે જાણે કે તે ઓપન ડિફરન્સિયલ હોય. ટોર્કનું વિતરણ સમપ્રમાણરીતે કરવામાં આવે છે, પરંતુ જ્યારે વ્હીલ્સ વચ્ચે વધુ પડતા પરિભ્રમણ તફાવત સાથે ટ્રેક્શનમાં ભિન્નતા અથવા વળાંકમાં પ્રવેશ થાય છે, ત્યારે સિસ્ટમ વધુ ટ્રેક્શન સાથે વ્હીલ પર ટોર્ક મોકલીને, ટ્રેક્શન અને ESP ના નિયંત્રણ સાથે મળીને કાર્ય કરે છે. . મંદી દરમિયાન, અન્ય ડ્રાઇવિંગ એક્સલ પર કોઈ તફાવત ન હોવાથી, ESP વ્હીલ બ્રેક્સ પર સ્વતંત્ર રીતે કાર્ય કરવા માટે જવાબદાર છે, તમામ સેન્સર દ્વારા તેને મોકલવામાં આવેલી માહિતીનું સંચાલન કરે છે.
સૌથી તાજેતરની ફોર-વ્હીલ ડ્રાઇવ સિસ્ટમ્સમાં, ટોર્ક વેક્ટરિંગ સિસ્ટમ એ પણ વધુ અગ્રણી ભૂમિકા ભજવે છે, જે બધી સિસ્ટમો સાથે કામ કરે છે, પરંતુ કેન્દ્રીય ફોર-વ્હીલ-ડ્રાઇવ મેનેજમેન્ટ મોડ્યુલ દ્વારા નિયંત્રિત થાય છે. આ મોડ્યુલ, ઇન્ટર-એક્સલ ટ્રેક્શનને મેનેજ કરવા ઉપરાંત, ટોર્ક વેક્ટરાઇઝેશન પ્રવેગક અને મંદી બંનેમાં કાર્ય કરે છે તે રીતે પણ સંચાલન કરે છે, ટોર્કને સંપૂર્ણ સ્વાયત્ત રીતે વ્હીલ્સમાંથી એકને મોકલે છે, ટ્રેક્શન કંટ્રોલ સિસ્ટમ્સ પર પણ ગણતરી કરે છે. અને અત્યંત આત્યંતિક પરિસ્થિતિઓ માટે ESP.
પોર્શ મેકન પર પીટીવી ઓપરેશન: