
Hauv nees nkaum xyoo dhau los, traction systems tau hloov zuj zus mus. Tab sis niaj hnub no, kev xa tawm lossis txwv lub log txav tsis txaus. Faib nws zoo thiab nrog kev txiav txim siab yog cov lus saib.
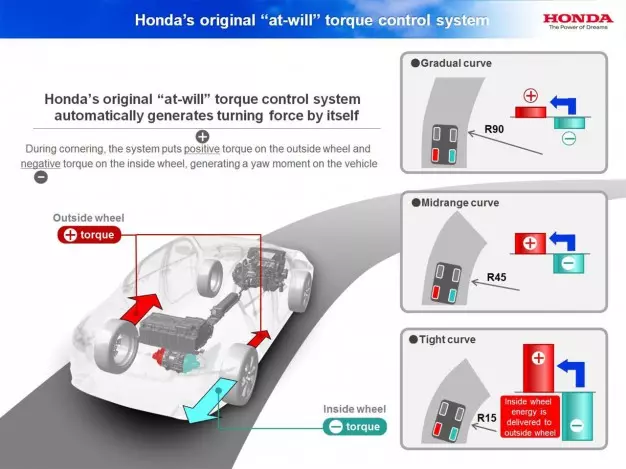
Lub tswv yim ntawm systems ntawm binary vectorization nws yog muab txhua lub log raws nraim lub zog nws xav tau, ntawm lub sijhawm zoo rau kev ua haujlwm tau zoo. Lub tswv yim tsis tuaj yeem yooj yim dua tab sis nws yog qhov sib sib zog nqus tau muab cov khoom siv hluav taws xob tsis zoo ntawm cov tshuab uas suav nrog nws.
binary vectoring ua haujlwm li cas?
Torque vectoring tsis muaj dab tsi ntau tshaj li kev pabcuam hluav taws xob uas nws lub luag haujlwm yog saib xyuas thiab faib lub zog rau lub log, suav nrog kev hloov pauv xws li iav hloov, lub kaum sab xis, qhov sib piv, G rog thiab lwm yam ntaub ntawv los ntawm cov sensors uas kuj tau sib koom los ntawm ESP thiab traction tswj modules.Cov ntaub ntawv raug txheeb xyuas hauv milliseconds yog li tso cai rau lub zog vectorization system tuaj yeem xa thiab tswj tau meej thiab tsuas yog ib puas ntawm ib thib ob, lub torque xav tau los ntawm lub log sab nraud, ua rau lub tsheb tig nrawm dua. Tab sis tsis tsuas yog nyob ntawm lub cev muaj zog, qhov nyuaj ntawm qhov kev txiav txim ntawm binary vectorization system sib txawv hauv nws txoj haujlwm.
Qhov tseeb torque vectoring systems coj kom zoo dua ntawm cov ntaub ntawv los ntawm ABS thiab ESP sensors (uas ntsuas tus kheej ceev ntawm txhua lub log) thiab lawv hom kev ua haujlwm nyob ntawm tag nrho cov hom ntawm traction lub tsheb muaj.
Nyob rau hauv pem hauv ntej-log tsav tsheb
Lub torque vectoring system yog kev koom ua ke nyob rau hauv kev tswj traction, uas yog, asymmetric tis ntawm torque yuav siv sij hawm mus rau hauv tus account tag nrho cov hais tsis, tab sis thaum kawg nws tsuas ua thaum lub traction tswj kuj ua, ua ib feem ntawm lub simulation ntawm xauv, zoo li nws yog. ib tug self-locking differential.
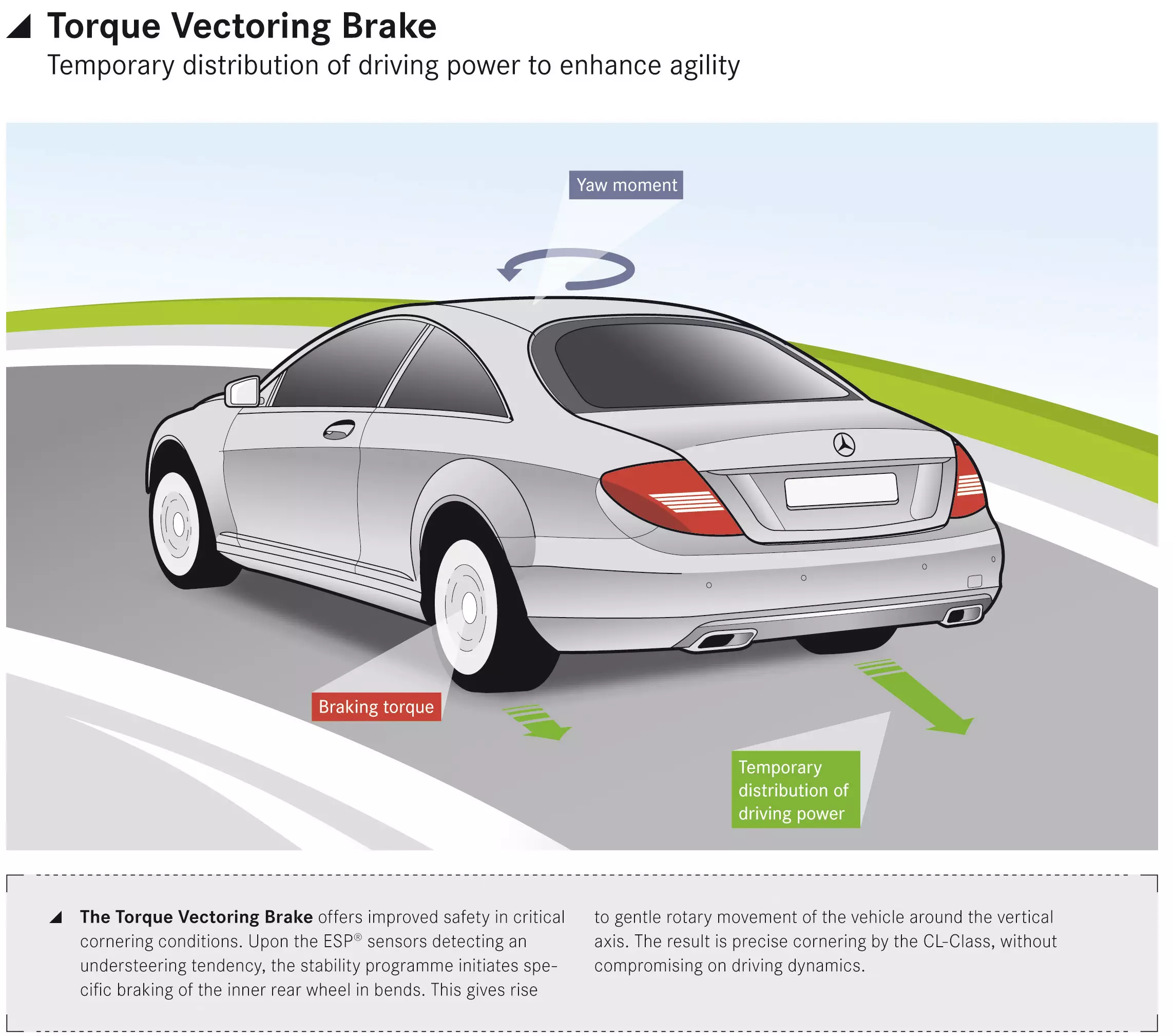
Thaum lub nrawm nce, lub kaw lus siv ESP tsis ntsuas los ntsuas lub tsheb qhov kev ruaj ntseg tsis zoo, ua rau ESP cuam tshuam rau theem ntawm lub brakes ntawm nws tus kheej yog tias tsim nyog.
Nyob rau hauv lub rear-log tsav tsheb
Lub vectoring system ua haujlwm nyob rau hauv tib txoj kev, xws li nyob rau hauv pem hauv ntej-log tsav tsheb thiab nyob rau hauv ob qho tib si, tsheb nrog ob-log tsav tshuab thiab torque vectoring systems tsis tas yuav tsum tau xauv qhov sib txawv, nrog rau lub brakes ua si lub luag hauj lwm ntawm limiting kev sib hloov ntawm ib. muab lub log.Nyob rau txhua lub log tsav tsheb
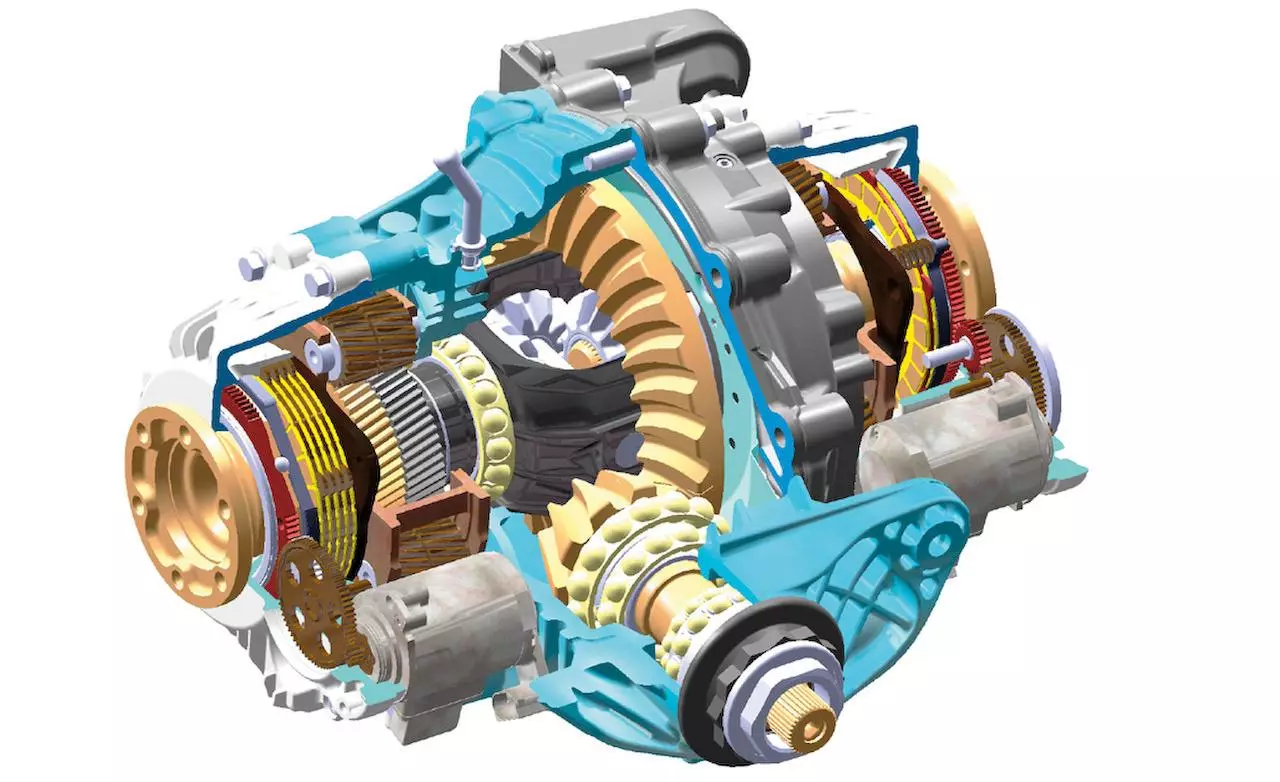
Kev ua haujlwm ntawm torque vectoring system yog txawv kiag li ntawm cov tsheb uas tsuas muaj ob lub log tsav. Ntawm no, lub kaw lus nyob saum toj no tag nrho ntawm plaub-log tsav module uas yog lub hlwb ntawm kev ua haujlwm thiab uas ua rau kev ua haujlwm ntawm torque vectorization.
Nyob rau hauv tag nrho cov-log-tsav tsheb, kev faib ntawm traction ntawm axles yog nyob ntawm seb ib tug neeg kho tshuab txhais tau tias - central differential - los yog electronically los ntawm multi-disc clutches los yog txawm ob qho tib si, ua rau nws tus kheej txawm ntau complex.
Nyob rau hauv tag nrho cov log-tsav tsheb uas suav nrog torque vectoring, ob qho tib si pem hauv ntej thiab nram qab qhov sib txawv muaj ntau-disc clutches ntawm txhua sab ntawm lub qag kom lawv tuaj yeem sib txawv ntawm qhov siv torque. Hauv lwm lo lus, ntxiv rau tag nrho lub log tsav tswj kev faib cov torque ntawm axles, lub zog torque vectoring tuaj yeem tswj tau qhov kev faib tawm ntawm lub log ntawm lub log.
Hauv kev xyaum, txhua lub log tsav tuaj yeem sib txawv ntawm axles thiab, nyob ntawm qhov system, los ntawm 0 txog 50% thiab los ntawm 0 mus rau 100% ntawm torque. Thaum lub zog torque vectoring muaj peev xwm sib txawv ntawm nws tus kheej ua ke nrog kev faib tawm ntawm lub zog ntawm cov qag, lub zog siv rau txhua lub log, ntawm lub qag pem hauv ntej yog 50-50% thiab hauv ib feem ntawm 0 txog 100% rau lub qag nram qab.
Qhov no yog txhua yam nyob rau hauv lub sij hawm thiab nyob rau hauv ib feem ntawm ib tug thib ob, uas tso cai rau kom zoo dua kev tswj ntawm kev hloov ntawm torque ntawm axles, pab kom ua tau zoo traction, txawm nyob rau hauv dynamic kev pab cuam nyob rau hauv cov ces kaum, txawm nyob rau hauv qis tuav qhov chaw thiab tag nrho nrog txhim kho roj noj. , txij li lub kaw lus muaj peev xwm tswj tau traction hauv lub sijhawm tiag tiag, tsis tu ncua thiab hloov pauv xa cov torque tsim nyog rau lub log tsim nyog, tsis tas siv lub zog siv.
Tsheb sib txawv nrog Torque Vectoring - BMW
Cov txiaj ntsig nyob rau hauv saib ntawm tus kheej-blocking txawv
Nrog rau cov thev naus laus zis tshiab tsis ntev los no tau qhia hauv torque vectoring systems, qhov sib txawv ntawm qhov sib txawv ntawm tus kheej tau siv tsawg dua thiab siv tsawg dua, nrog kev ua haujlwm tsawg dua, qhov hnyav dua ntawm cov teeb, kev nplua thiab siab tshaj tag nrho cov kev txwv ntawm tsuas yog tuaj yeem ua qhov sib txawv ntawm traction ntawm lub log. tsuas yog thaum ib lub log muaj kev sib hloov ntau dhau piv rau lwm qhov. Kev sib hloov ntau dhau ua rau lub clutch sab hauv ntawm LSD thiab lub caij nplooj ntoo hlav - kev sib txhuam ntawm cov 2 cov khoom no txiav txim siab qhov sib faib ntawm lub zog ntawm ob lub log kom lawv tig nyob rau hauv vaj huam sib luag.
Cov duab binary vectorization
Kev thaiv tus kheej qhov sib txawv tuaj yeem yog peb hom: 1-txoj kev, 1.5-txoj kev thiab 2-txoj kev. Slip-lock differentials ua hauj lwm nyob rau hauv 1-txoj kev acceleration nkaus xwb, los yog nyob rau hauv 1.5-txoj kev acceleration thiab ib nrab-deceleration, los yog nyob rau hauv 2-txoj kev acceleration thiab deceleration, thaum xyuas kom meej tias lub log marginally tau txais 50% ntawm cov traction, yog li tiv thaiv overspeeding. ntawm ib lub log tsis muaj traction. Torque vectoring systems kuj tuaj yeem ua rau ob qho tib si acceleration thiab deceleration, tab sis nrog rau qhov zoo ntawm kev sib txawv los yog tag nrho txiav tawm lub torque nkag mus rau lub log nrog ntau dhau kev sib hloov.
Ntawm accelerating ob-log tsav tsheb, torque vectoring ua rau ntawm qhov sib txawv raws li nws yog qhov qhib qhov sib txawv. Lub torque faib yog ua tiav symmetrically, tab sis txij li lub sijhawm thaum muaj kev hloov pauv hauv traction lossis nkag mus rau hauv cov nkhaus nrog ntau qhov sib txawv ntawm lub log, lub kaw lus ua haujlwm los ntawm kev xa lub zog rau lub log nrog ntau dua traction, ua ke nrog kev tswj ntawm traction thiab ESP. . Thaum lub sij hawm deceleration, vim tsis muaj qhov sib txawv ntawm lwm lub qag tsav tsheb, ESP yog lub luag haujlwm rau kev ua haujlwm ntawm lub log nres ntawm nws tus kheej, tswj cov ntaub ntawv xa mus rau nws los ntawm tag nrho cov sensors.
Nyob rau hauv cov tshuab plaub-log tsav tsis ntev los no, lub torque vectoring system plays lub luag haujlwm tseem ceeb dua, ua ke nrog txhua lub tshuab, tab sis tswj los ntawm lub hauv paus plaub-log-tsav tswj module. Qhov no module, ntxiv rau kev tswj lub inter-axle traction, kuj tswj txoj kev uas lub torque vectorization ua ob qho tib si nyob rau hauv acceleration thiab deceleration, xa lub torque nyob rau hauv ib tug kiag li autonomous txoj kev mus rau ib tug ntawm cov log, kuj suav rau traction tswj systems. thiab ESP rau qhov xwm txheej hnyav tshaj plaws.
PTV ua haujlwm ntawm Porsche Macan: