
Sistem kemudi aktif untuk gandar belakang, terintegrasi dengan sistem kemudi mobil, melengkapi semakin banyak kendaraan: dari Porsche 911 GT3/RS hingga Ferrari 812 Superfast atau bahkan Renault Mégane RS terbaru.
Sistem ini bukanlah hal baru. Dari sistem kemudi pasif pertama hingga sistem aktif terbaru, jalur pengembangan dan pengendalian biaya teknologi ini telah berlangsung lama, tetapi ZF telah mengembangkan apa yang akan menjadi sistem kemudi aktif pertama yang melengkapi kendaraan produksi secara komprehensif.
Selain pertimbangan merek, salah satu produsen komponen mobil yang paling banyak mendapat penghargaan di dunia (gelar ke-8 berturut-turut pada tahun 2015), ZF, merevolusi sistem kemudi aktif untuk gandar belakang dengan evolusi alami dari sistem sebelumnya, lebih murah dan tidak rumit.

Terdiri dari apa sistem kemudi ZF?
Selain akronim dan nomenklatur, kita akan melihat banyak merek menggunakan basis sistem kemudi ZF, yang secara internal disebut AKC (Active Kinematics Control). Dari merek ke merek, itu mengubah nama tetapi akan menjadi sistem yang sama.
Nama yang diberikan ZF bahkan memberi kita petunjuk bagus tentang sifat sistem ini. Dari kontrol gaya kinematik, kita dapat segera menyimpulkan bahwa sistem bekerja berdasarkan gaya gerakan, tetapi kita tidak ingin membahas masalah Fisika Terapan atau Dasar-dasar Mekanika Klasik. Jangan…
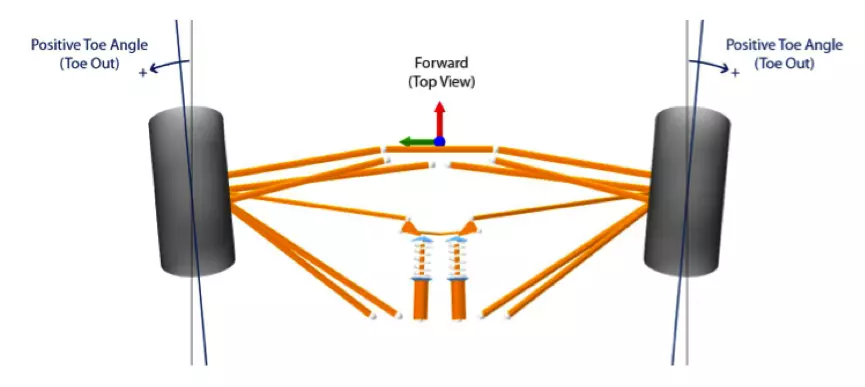
Sistem ini dikendalikan oleh modul kontrol (ECS) yang bertugas mengelola secara aktif, melalui parameter yang diterima oleh sensor kecepatan, sudut roda, dan pergerakan roda kemudi — semuanya berfungsi dalam variasi sudut toe-in di roda belakang.
Variasi yang sama dalam sudut konvergensi roda belakang dapat mencapai 3º perbedaan antara variasi positif dan negatif. Artinya, dengan sudut negatif, roda-roda yang dilihat dari atas memiliki kesejajaran cembung yang membentuk V, di mana puncak dari V yang sama ini mewakili sudut pada 0 °, memproyeksikan bukaan roda ke luar. Hal sebaliknya terjadi pada sudut positif, di mana toe-in alignment roda membentuk , memproyeksikan sudut roda ke dalam.
Bagaimana sistem ZF AKC mengatur untuk memvariasikan sudut toe-in pada roda gandar belakang?
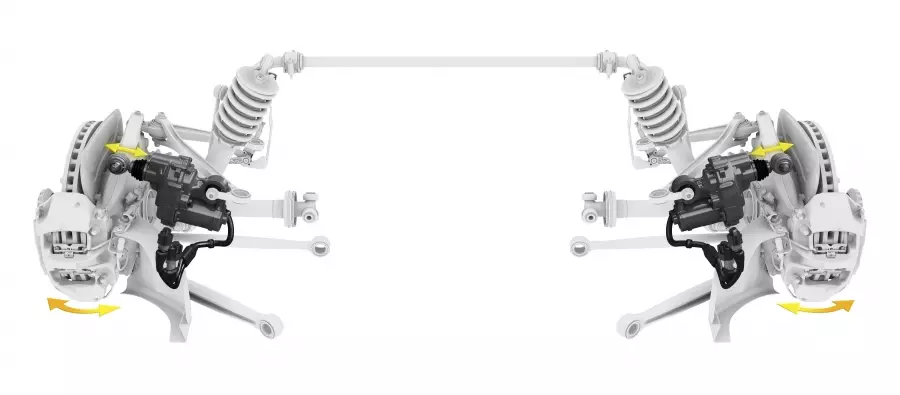
Seperti sistem masa lalu, semua menggunakan aktuator hidrolik atau elektro-hidraulik. ZF adalah elektrohidraulik dan memiliki dua bentuk berbeda: atau sebagai aktuator pusat atau ganda . Dalam hal kendaraan berperforma tinggi, aktuator elektro-hidraulik yang ditempatkan pada suspensi setiap roda digunakan.
Bahkan, ketika kendaraan dilengkapi dengan aktuator ganda, mereka menggantikan lengan suspensi atas, di mana lengan crosslink lain bergabung dengan lengan atas. Pengoperasian aktuator merespons langsung input dari modul kontrol ECS yang, secara real time, mengubah sudut konvergensi roda gandar belakang.
Bagaimana cara kerja sistem ZF AKC?
Seperti yang telah disebutkan, input yang kami berikan ke roda kemudi, sudut belok dan kecepatan roda depan, memungkinkan modul kontrol ECS untuk menentukan variasi sistem kemudi aktif. Dalam praktiknya, pada kecepatan rendah atau dalam manuver parkir, sistem kemudi aktif memvariasikan sudut roda belakang ke arah yang berlawanan dengan depan, mengurangi sudut belok dan mendukung parkir paralel.
Saat berkendara dengan kecepatan lebih tinggi (dari 60 km/jam), sistem kemudi aktif memastikan stabilitas lebih di tikungan. Pada tahap ini roda belakang berputar searah dengan roda depan.
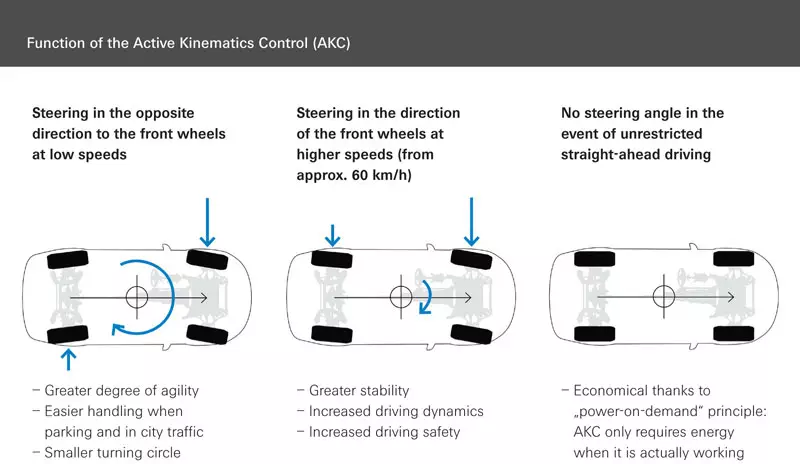
Ketika kendaraan dikemudikan tanpa gerakan roda kemudi, modul kontrol secara otomatis mengasumsikan bahwa itu tidak digunakan, sehingga menghemat konsumsi energi. Faktanya, sistem kemudi aktif ZF adalah sistem "Steering on Demand", tetapi juga sistem "Power on Demand".
ZF membutuhkan waktu bertahun-tahun untuk mendemokratisasikan sistem kemudi aktif ini dan Porsche adalah salah satu produsen pertama yang merakit generasi baru kemudi aktif ini sebagai rangkaian pada tahun 2014. Pada tahun 2015, setelah satu tahun mematangkan sistem, Ferrari mengikuti jalan yang sama. Di masa depan bisa jadi hampir semua model sport diberikan kompatibilitas solusi teknis yang telah dikembangkan ZF.