
Pēdējo divdesmit gadu laikā vilces sistēmas ir ļoti attīstījušās. Bet šodien nepietiek ar riteņu kustības pārraidīšanu vai ierobežošanu. Izplatiet to efektīvi un apdomīgi ir atslēgas vārds.
Ideja par sistēmām binārā vektorizācija tas ir nodrošināt katram ritenim tieši tik nepieciešamo jaudu ideālā laikā efektīvai darbībai. Koncepcija nevar būt vienkāršāka, taču tā ir ļoti sarežģīta, ņemot vērā to sistēmu elektronisko sarežģītību.
Kā darbojas binārā vektorēšana?
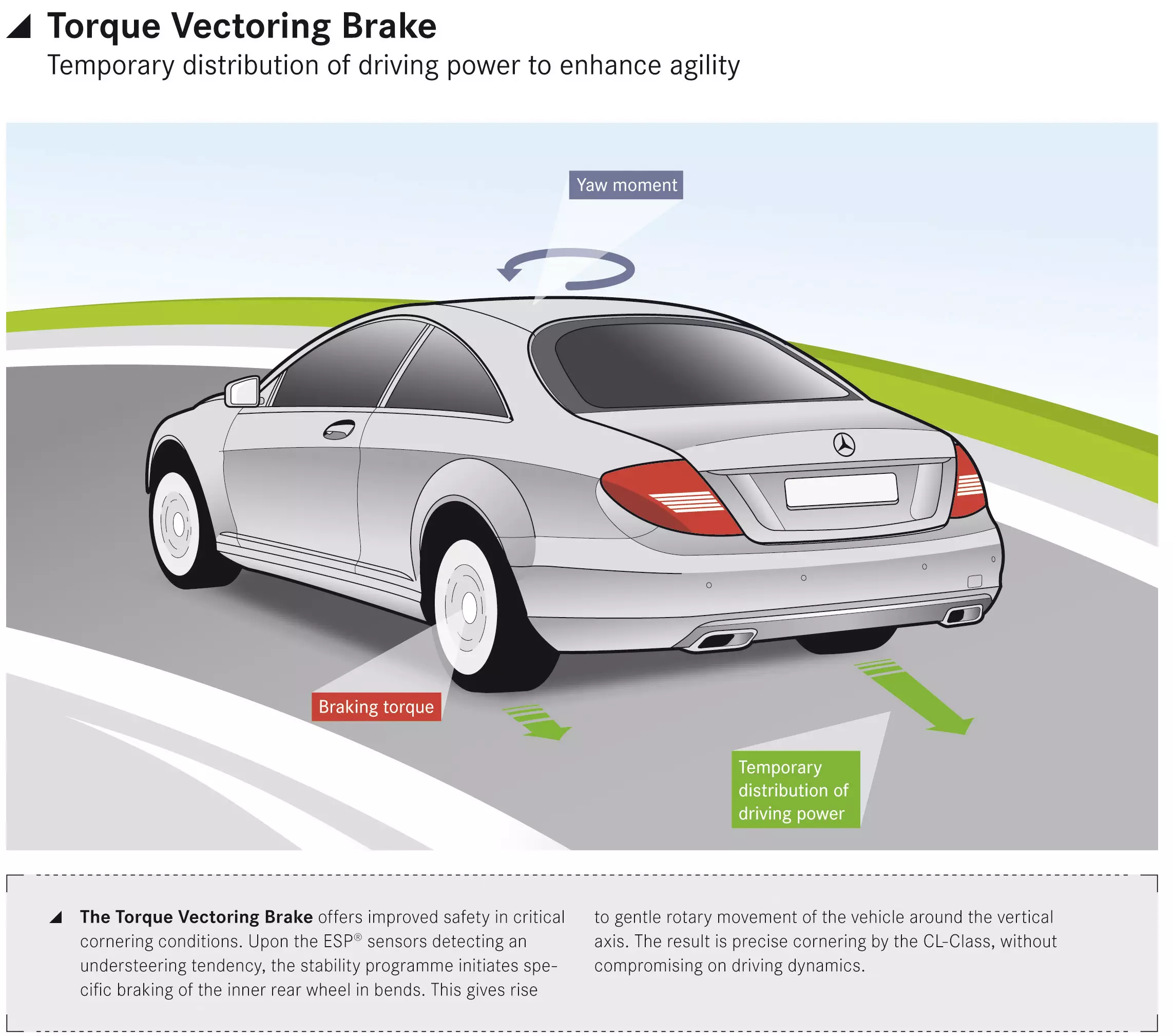
Griezes momenta vektorēšana ir nekas vairāk kā elektronisks palīglīdzeklis, kura uzdevums ir uzraudzīt un sadalīt jaudu uz riteņiem, ņemot vērā tādus mainīgos lielumus kā pārnesumu pārslēgšana, stūres leņķis, dreifēšanas koeficients, G spēki un cita informācija, kas nāk no sensoriem, ko koplieto arī ESP. un vilces kontroles moduļi.Informācija tiek analizēta milisekundēs, tādējādi ļaujot griezes momenta vektorizācijas sistēmai automātiski precīzi un tikai vienā sekundes simtdaļā nosūtīt un pārvaldīt ārējam aizmugurējam ritenim nepieciešamo griezes momentu, liekot automašīnai pagriezties ātrāk. Bet ne tikai atkarībā no motora sistēmas, binārās vektorizācijas sistēmas darbības sarežģītība atšķiras pēc tās funkcijām.
Jaunākās griezes momenta vektoru sistēmas izmanto informāciju no ABS un ESP sensoriem (kas mēra katra riteņa individuālo ātrumu), un to darbības režīms galvenokārt ir atkarīgs no transportlīdzekļa saķeres veida.
Priekšpiedziņas transportlīdzekļos
Vilces kontrolē ir integrēta griezes momenta vektorēšanas sistēma, tas ir, asimetrisks griezes momenta sadalījums ņem vērā visus minētos parametrus, bet galu galā tā darbojas tikai tad, kad darbojas arī vilces kontrole, veidojot daļu no bloķēšanas simulācijas, it kā tas būtu pašbloķējošs diferenciālis.
Kad ātrums palielinās, sistēma izmanto ESP parametrus, lai novērtētu automašīnas stabilitātes parametrus, liekot ESP neatkarīgi iejaukties bremžu līmenī, ja tas ir pamatoti.
Aizmugurējo riteņu piedziņas transportlīdzekļos
Vektoru sistēma darbojas daļēji tāpat kā priekšējo riteņu piedziņas transportlīdzekļos, un abos gadījumos transportlīdzekļiem ar divu riteņu piedziņas sistēmām un griezes momenta vektoru sistēmām nav nepieciešami diferenciāļa bloķēšana, un bremzēm ir transportlīdzekļa rotācijas ierobežošanas loma. dots ritenis.Uz visu riteņu piedziņas transportlīdzekļiem
Griezes momenta vektoru sistēmas darbība pilnībā atšķiras no transportlīdzekļiem ar tikai diviem piedziņas riteņiem. Šeit sistēma galvenokārt ir atkarīga no četru riteņu piedziņas moduļa, kas ir operāciju smadzenes un kas vada griezes momenta vektorizācijas veiktspēju.
Visu riteņu piedziņas transportlīdzekļos saķeres sadalījums starp asīm ir atkarīgs vai nu no mehāniskiem līdzekļiem – centrālā diferenciāļa – vai elektroniski, izmantojot daudzdisku sajūgus vai pat abus, padarot pašu sistēmu vēl sarežģītāku.
Lielākajā daļā visu riteņu piedziņas transportlīdzekļu, kas ietver griezes momenta vektorēšanu, gan priekšējiem, gan aizmugurējiem diferenciāļiem ir daudzdisku sajūgi katrā attiecīgās ass pusē, lai tie varētu mainīt pielietoto griezes momentu. Citiem vārdiem sakot, papildus visu riteņu piedziņas sistēmai, kas pārvalda griezes momenta sadali starp asīm, griezes momenta vektoru sistēma var arī kontrolēt griezes momenta sadalījumu starp riteņiem.
Praksē visu riteņu piedziņas sistēma var atšķirties starp asīm un, atkarībā no sistēmas, no 0 līdz 50% un no 0 līdz 100% griezes momenta. Kamēr griezes momenta vektoru sistēma spēj autonomi mainīties līdz ar griezes momenta sadalījumu starp asīm, katram ritenim pieliktais griezes moments uz priekšējās ass ir 50-50% un proporcijā no 0 līdz 100% aizmugurējai asij.
Tas viss notiek reāllaikā un sekundes daļās, kas ļauj labāk pārvaldīt griezes momenta pārnesi starp asīm, palīdzot sasniegt labāku saķeri gan ar dinamisku atbalstu līkumos, gan uz virsmām ar zemu saķeri un ar uzlabotu degvielas patēriņu. , jo sistēma spēj vadīt saķeri reāllaikā, nepārtraukti un mainīgi nosūtot nepieciešamo griezes momentu uz nepieciešamajiem riteņiem, netērējot enerģijas resursus.
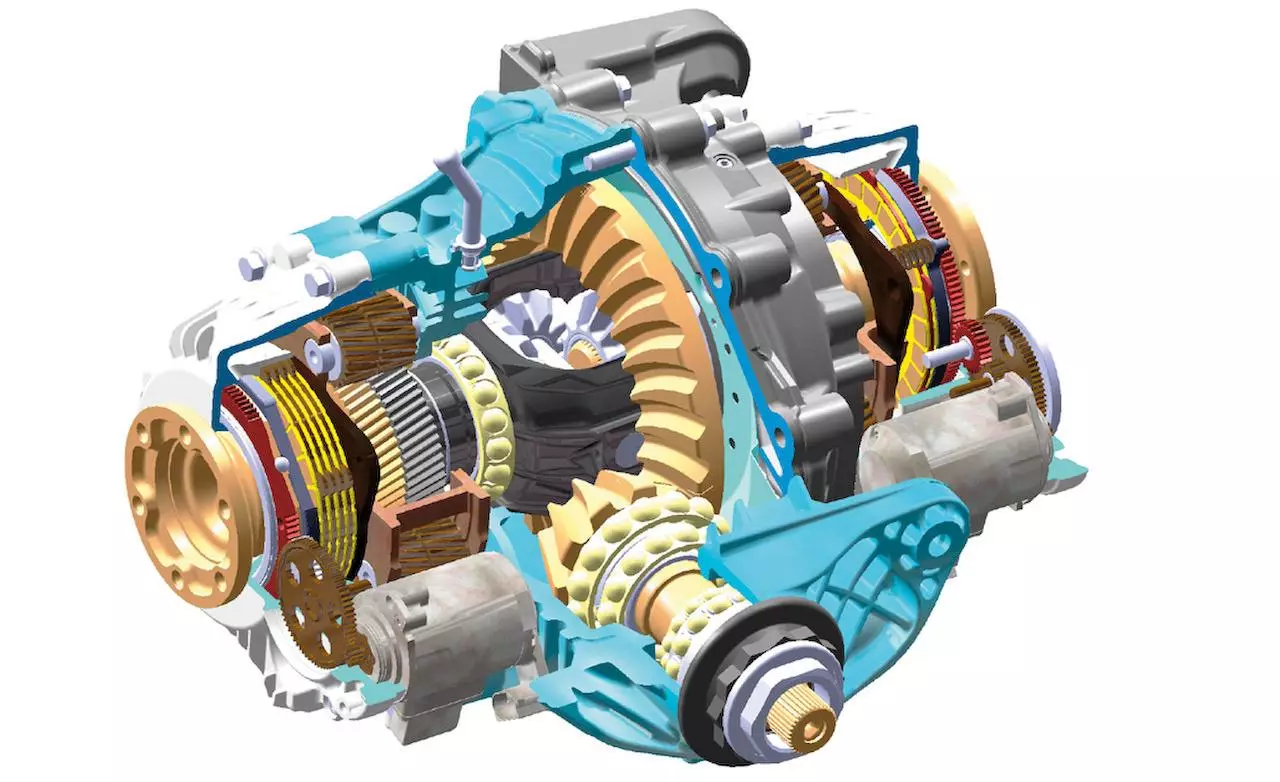
Aizmugurējais diferenciālis ar griezes momenta vektorizāciju - BMW
Ieguvumi ņemot vērā pašbloķējošos diferenciāļus
Līdz ar jaunākajiem tehnoloģiskajiem jauninājumiem, kas ieviesti griezes momenta vektoru sistēmās, pašbloķējošie diferenciāļi kļūst arvien retāk izmantoti, mazāk reaģējot, palielinot komplekta svaru, samazinot patēriņu un, pats galvenais, ierobežojot iespēju tikai mainīt saķeri starp riteņiem. tikai tad, ja vienam no riteņiem ir pārmērīga rotācija salīdzinājumā ar otru. Pārmērīga griešanās piespiež LSD iekšējo sajūgu un atsperu komplektu – berze starp šiem 2 komponentiem nosaka griezes momenta sadalījumu starp diviem riteņiem tā, lai tie grieztos vienādos apstākļos.
Formas binārā vektorizācija
Pašbloķējošie diferenciāļi var būt trīs veidu: 1-virzienu, 1,5-virzienu un 2-virzienu diferenciāļi. Slīdes bloķēšanas diferenciāļi darbojas tikai ar 1 virzienu paātrinājumu vai 1,5 virzienu paātrinājumu un pusi palēninājumu, vai divvirzienu paātrinājumu un palēninājumu, vienlaikus nodrošinot, ka riteņi nedaudz saņem 50% saķeres, tādējādi novēršot ātruma pārsniegšanu. viena no riteņiem bez saķeres. Griezes momenta vektoru sistēmas var iedarboties gan uz paātrinājumu, gan palēninājumu, taču ar priekšrocību var mainīt vai pat pilnībā nogriezt ritenim pievadīto griezes momentu ar pārmērīgu rotāciju.
Paātrinot divu riteņu piedziņas transportlīdzekļus, griezes momenta vektors iedarbojas uz diferenciāli tā, it kā tas būtu atvērts diferenciālis. Griezes momenta sadalījums tiek veikts simetriski, bet no brīža, kad rodas vilces izmaiņas vai iebraukšana līkumos ar pārmērīgu griešanās starpību starp riteņiem, sistēma darbojas, nosūtot griezes momentu uz riteni ar lielāku saķeri, darbojoties kopā ar saķeres un ESP kontroli. . Palēninājuma laikā, tā kā uz otras dzenošās ass nav diferenciāļa, ESP ir atbildīgs par neatkarīgu darbību uz riteņu bremzēm, pārvaldot visu sensoru tai nosūtīto informāciju.
Jaunākajās četru riteņu piedziņas sistēmās griezes momenta vektoru sistēmai ir vēl svarīgāka loma, kas darbojas kopā ar visām sistēmām, bet to kontrolē centrālais četru riteņu piedziņas vadības modulis. Šis modulis papildus starpasu vilces pārvaldībai pārvalda arī veidu, kā griezes momenta vektorizācija darbojas gan paātrinājumā, gan palēninājumā, nosūtot griezes momentu pilnīgi autonomā veidā uz kādu no riteņiem, rēķinoties arī ar vilces kontroles sistēmām. un ESP ekstrēmākajām situācijām.
PTV darbība Porsche Macan: