
Сүүлийн хорин жилд зүтгүүрийн системүүд маш их хувьсан өөрчлөгдсөн. Гэвч өнөөдөр дугуйны хөдөлгөөнийг дамжуулах, хязгаарлах нь хангалтгүй юм. Үүнийг үр ашигтай, ухамсартайгаар түгээх нь гол түлхүүр юм.
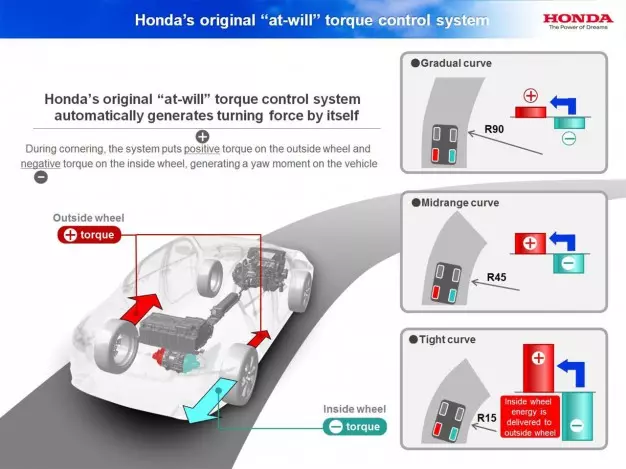
-ийн системийн санаа хоёртын векторчлал Энэ нь дугуй тус бүрийг үр ашигтай ажиллах хамгийн тохиромжтой цагт яг хэрэгтэй хүчийг өгөх явдал юм. Энэхүү үзэл баримтлал нь илүү энгийн байж болохгүй, гэхдээ түүнийг бүрдүүлдэг системүүдийн цахим нарийн төвөгтэй байдлыг харгалзан үзэхэд энэ нь маш нарийн төвөгтэй юм.
Хоёртын векторчлал хэрхэн ажилладаг вэ?
Эргэлтийн моментийн векторчлол нь араа солих, жолооны өнцөг, шилжилтийн харьцаа, G хүч болон ESP-ийн хуваалцдаг мэдрэгчээс ирж буй бусад мэдээллийг харгалзан дугуйнуудын хүчийг хянах, хуваарилах зорилготой цахим тусламжаас өөр зүйл биш юм. болон зүтгүүрийн хяналтын модулиуд.Мэдээллийг миллисекундэд задлан шинжилдэг тул эргүүлэх моментийн векторжуулалтын систем нь арын дугуйнд шаардагдах эргэлтийг секундын 100-ны нэгийн дотор автоматаар илгээж, удирдах боломжийг олгодог бөгөөд ингэснээр машин илүү хурдан эргэх болно. Гэхдээ зөвхөн моторын системээс хамаараад зогсохгүй хоёртын векторжуулалтын системийн үйл ажиллагааны нарийн төвөгтэй байдал нь түүний функцэд өөр өөр байдаг.
Хамгийн сүүлийн үеийн моментийн векторын системүүд нь ABS болон ESP мэдрэгчийн (дугуй бүрийн хурдыг хэмждэг) мэдээллийн давуу талыг ашигладаг бөгөөд тэдгээрийн ажиллах горим нь юуны түрүүнд тээврийн хэрэгслийн зүтгүүрийн төрлөөс хамаарна.
Урд дугуйгаар хөтөлдөг тээврийн хэрэгсэлд
Моментийн векторын системийг зүтгүүрийн удирдлагад нэгтгэсэн, өөрөөр хэлбэл эргүүлэх моментийн тэгш бус хуваарилалт нь дурдсан бүх параметрүүдийг харгалзан үздэг боловч эцсийн эцэст энэ нь зүтгүүрийн удирдлага ажиллаж байх үед л үйлчилж, түгжээний симуляцийн нэг хэсэг болох юм. өөрөө түгжигдэх дифференциал.
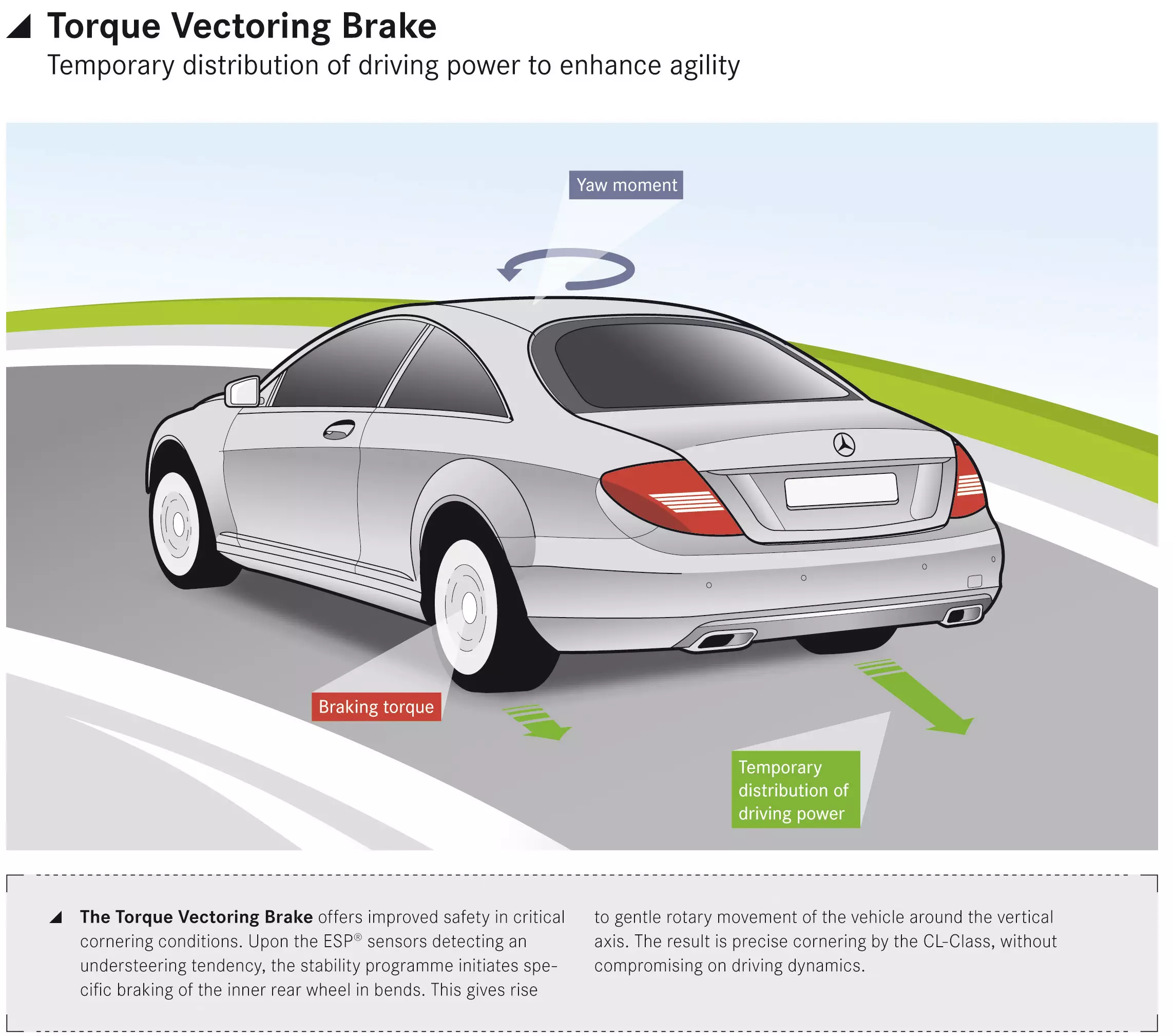
Хурд нэмэгдэхэд систем нь машины тогтвортой байдлын параметрүүдийг үнэлэхийн тулд ESP параметрүүдийг ашигладаг бөгөөд хэрэв үндэслэлтэй бол ESP нь тоормосны түвшинд бие даан хөндлөнгөөс оролцдог.
Хойд хөтлөгчтэй тээврийн хэрэгсэлд
Векторын систем нь урд дугуйгаар хөтөлдөг тээврийн хэрэгслийн нэгэн адил хэсэгчлэн ажилладаг бөгөөд хоёр дугуйгаар хөтлөгчтэй, эргэлтийн моментийн вектор системтэй тээврийн хэрэгсэлд түгжих дифференциал шаардлагагүй, тоормос нь эргэлтийг хязгаарлах үүрэг гүйцэтгэдэг. өгсөн дугуй.Бүх дугуйгаар хөтлөгчтэй тээврийн хэрэгсэл дээр
Эргэлтийн моментийн векторын системийн ажиллагаа нь зөвхөн хоёр хөтлөгчтэй дугуйтай машинуудаас огт өөр юм. Энд систем нь юун түрүүнд үйл ажиллагааны тархи болох дөрвөн дугуйгаар хөтлөгчтэй модулиас хамаардаг бөгөөд эргэлтийн моментийн векторжуулалтын гүйцэтгэлийг удирддаг.
Бүх дугуйгаар хөтөлдөг тээврийн хэрэгслийн хувьд тэнхлэг хоорондын зүтгүүрийн хуваарилалт нь механик хэрэгслээс (төв дифференциал) эсвэл олон дискний шүүрч авах замаар цахим хэлбэрээр эсвэл бүр хоёуланд нь хамаардаг тул системийг өөрөө илүү төвөгтэй болгодог.
Моментийн векторыг багтаасан ихэнх бүх дугуйгаар хөтөлдөг тээврийн хэрэгслийн урд болон хойд дифференциалууд нь тус тусын тэнхлэгийн тал бүр дээр олон дисктэй шүүрч авах боломжтой бөгөөд тэдгээр нь хэрэглэж буй эргүүлэх хүчийг өөрчилдөг. Өөрөөр хэлбэл, тэнхлэг хоорондын эргүүлэх хүчийг хуваарилах бүх дугуйгаар хөтлөгчтэй системээс гадна эргэлтийн моментийн векторын систем нь дугуй хоорондын эргүүлэх моментийн хуваарилалтыг хянах боломжтой.
Практикт бүх дугуйгаар хөтлөгчтэй систем нь тэнхлэгүүдийн хооронд өөр өөр байж болох ба системээс хамааран 0-50%, эргүүлэх моментийн 0-ээс 100% хооронд хэлбэлздэг. Моментийн векторын систем нь тэнхлэгүүдийн хоорондох эргүүлэх моментийн хуваарилалтаас хамааран бие даан өөрчлөгдөх боломжтой боловч урд тэнхлэгт дугуй тус бүрт үйлчлэх момент 50-50%, хойд тэнхлэгт 0-100% байна.
Энэ бүхэн бодит цаг хугацаанд, секундын хэдэн хэсэгт багтах бөгөөд энэ нь тэнхлэг хоорондын эргүүлэх хүчийг илүү сайн удирдах боломжийг олгодог бөгөөд буланд динамик дэмжлэг үзүүлэх, барьцалдаагүй гадаргуу дээр байх, түлшний зарцуулалтыг сайжруулах зэрэг илүү сайн зүтгүүрийг бий болгоход тусалдаг. , систем нь бодит цаг хугацаанд зүтгүүрийг удирдах чадвартай тул эрчим хүчний нөөцийг дэмий үрэлгүйгээр шаардлагатай дугуй руу шаардлагатай эргэлтийг тасралтгүй, хувьсах замаар илгээдэг.
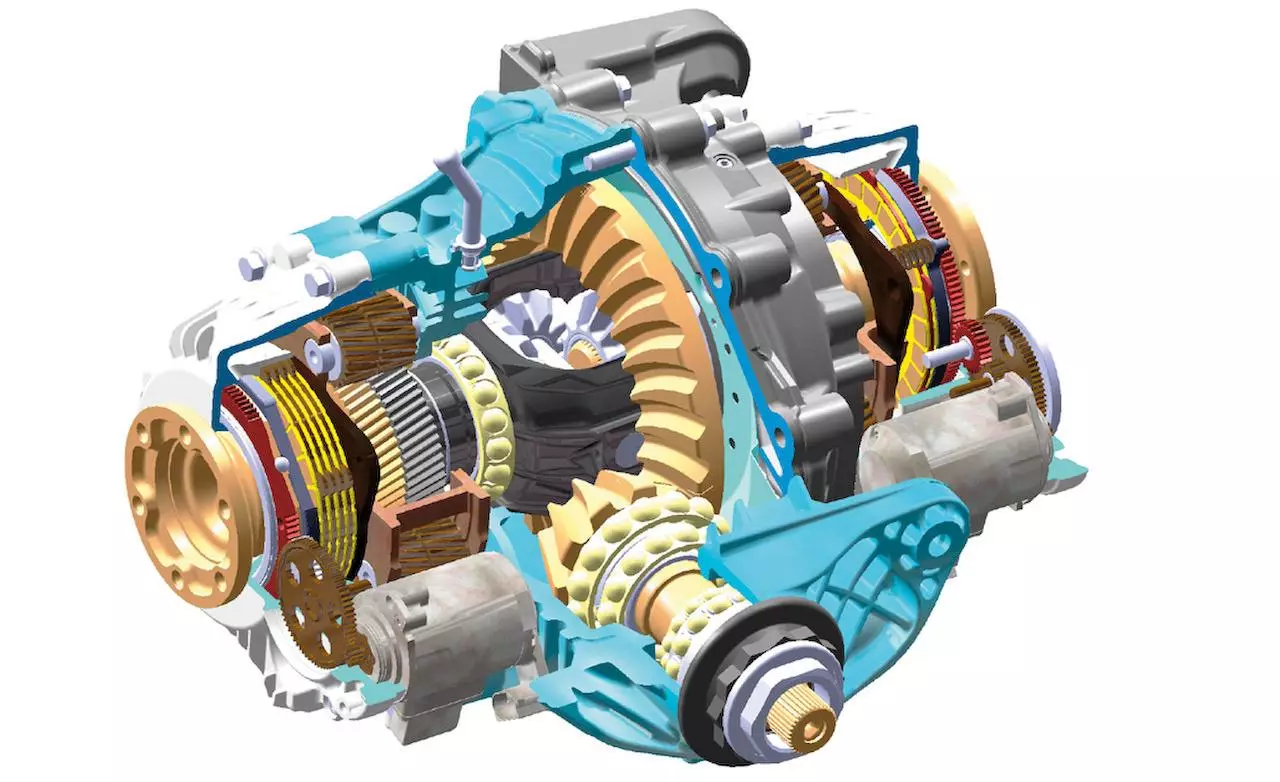
Моментийн вектортой арын дифференциал - BMW
Ашиг тус өөрөө блоклох дифференциалуудыг харгалзан
Моментийн векторын системд сүүлийн үеийн технологийн шинэчлэлтүүдийг нэвтрүүлснээр өөрөө түгжигдэх дифференциалууд багасч, хариу үйлдэл багатай, багцын жин ихсэх, хэрэглээний торгууль, хамгийн чухал нь зөвхөн дугуй хоорондын зүтгүүрийн өөрчлөлтийг хийх хязгаарлалттай болсон. зөвхөн нэг дугуй нь нөгөөгөөсөө хэт их эргэлддэг. Хэт их эргэлт нь LSD-ийн дотоод шүүрч авах ба пүршний багцыг хүчээр шахдаг - эдгээр 2 бүрэлдэхүүн хэсгийн хоорондох үрэлт нь хоёр дугуйны хоорондох эргэлтийн моментийн хуваарилалтыг тодорхойлдог бөгөөд ингэснээр тэд тэнцүү нөхцөлд эргэдэг.
Дүрсүүд хоёртын векторчлал
Өөрөө блоклох дифференциал нь 1 чиглэлтэй, 1.5 чиглэлтэй, 2 чиглэлтэй гэсэн гурван төрөлтэй байж болно. Гулсах түгжээтэй дифференциал нь зөвхөн 1 талын хурдатгалд, эсвэл 1.5 талын хурдатгал ба хагас удаашралтай, эсвэл 2 талын хурдатгал ба удаашралд ажилладаг бөгөөд дугуйнууд нь зүтгүүрийн 50% -ийг бага хэмжээгээр авдаг бөгөөд ингэснээр хэт хурдасахаас сэргийлдэг. зүтгүүргүй дугуйнуудын аль нэгнийх нь . Моментийн векторын системүүд нь хурдатгал болон удаашралын аль алинд нь ажиллах боломжтой боловч илүүдэл эргэлттэй дугуйнд нийлүүлсэн эргүүлэх хүчийг өөрчлөх эсвэл бүр бүрэн таслах давуу талтай.
Хоёр дугуйгаар хөтөлдөг тээврийн хэрэгслийг хурдасгах үед эргүүлэх момент нь дифференциал дээр нээлттэй дифференциал мэт ажилладаг. Моментийн хуваарилалтыг тэгш хэмтэй хийдэг боловч зүтгүүрийн хэлбэлзэл эсвэл дугуйнуудын хоорондох эргэлтийн хэт их зөрүүтэй муруй руу орох мөчөөс эхлэн систем нь дугуй руу эргүүлэх хүчийг илүү их зүтгүүрээр илгээж, зүтгүүрийн болон ESP-ийн удирдлагатай хамт ажилладаг. . Хурд саарах үед нөгөө жолооны тэнхлэгт дифференциал байхгүй тул ESP нь дугуйны тоормос дээр бие даан ажиллах, бүх мэдрэгчээс түүнд илгээсэн мэдээллийг удирдах үүрэгтэй.
Хамгийн сүүлийн үеийн дөрвөн дугуйгаар хөтлөгчтэй системүүдэд эргэлтийн моментийн векторын систем нь бүх системтэй хамт ажилладаг боловч төв дөрвөн дугуйгаар хөтлөгчтэй удирдлагын модулиар удирддаг илүү чухал үүрэг гүйцэтгэдэг. Энэхүү модуль нь тэнхлэг хоорондын зүтгүүрийг удирдахаас гадна моментийн векторчлол нь хурдатгал ба удаашралын аль алинд нь үйлчлэх арга замыг удирдаж, эргүүлэх хүчийг аль нэг дугуй руу бүрэн бие даасан байдлаар илгээж, зүтгүүрийн хяналтын системийг тооцдог. болон хамгийн онцгой нөхцөл байдалд зориулсан ESP.
Porsche Macan дээрх PTV ажиллагаа: