
Dalam dua puluh tahun yang lalu, sistem daya tarikan telah banyak berkembang. Tetapi hari ini, menghantar atau menyekat pergerakan roda tidak mencukupi. Mengedarkannya dengan cekap dan dengan budi bicara adalah kata kuncinya.
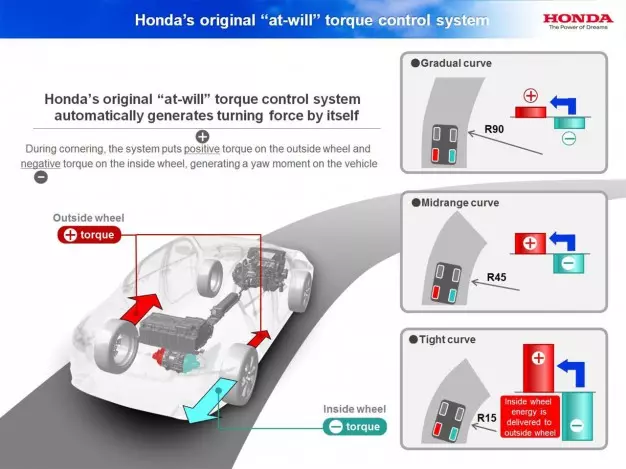
Idea sistem vektorisasi binari ia adalah untuk memberikan setiap roda kuasa yang diperlukannya, pada masa yang sesuai untuk prestasi yang cekap. Konsep ini tidak boleh menjadi lebih mudah tetapi ia sangat rumit memandangkan kerumitan elektronik sistem yang merangkuminya.
Bagaimanakah pemvektoran binari berfungsi?
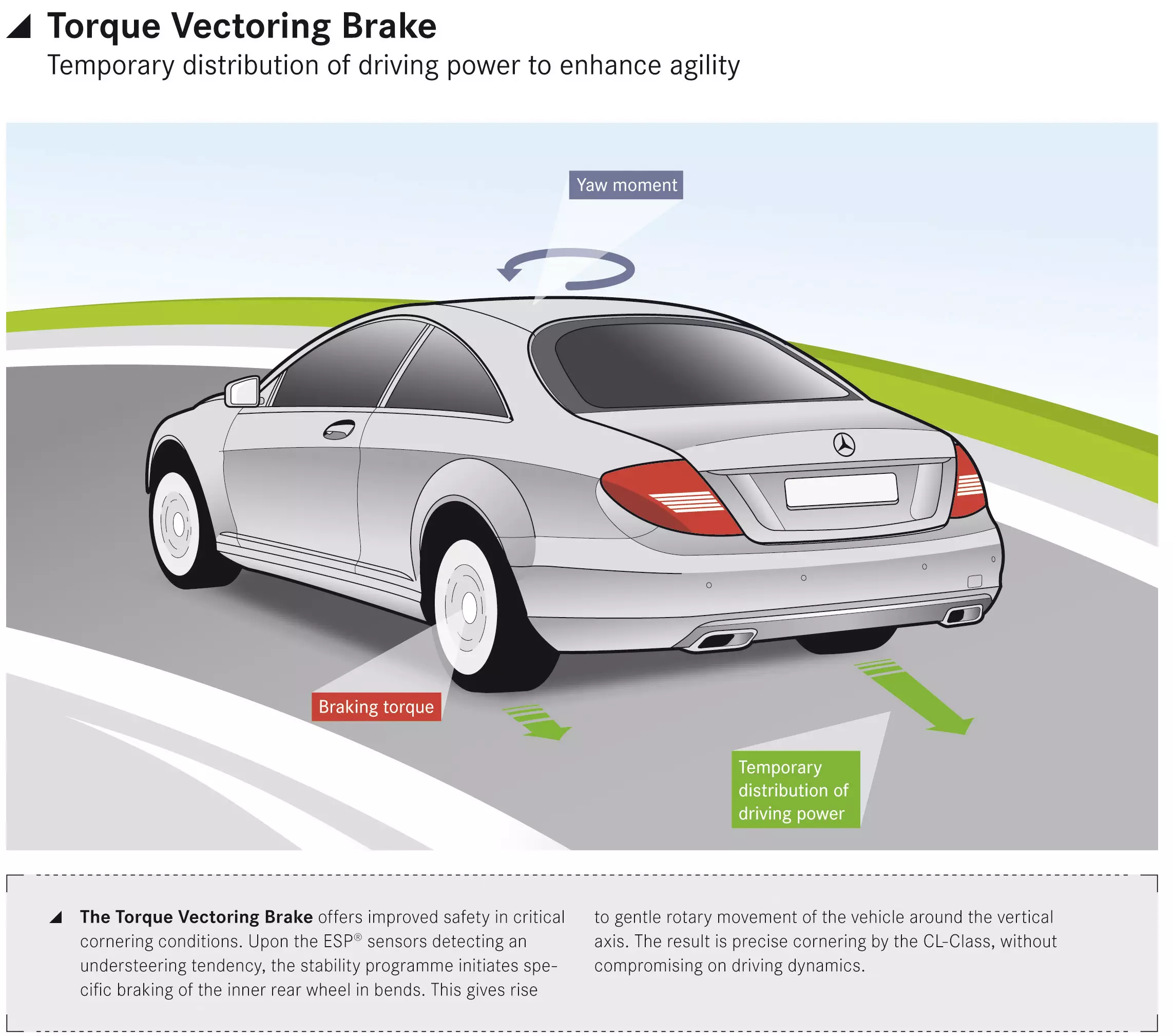
Penvektoran tork tidak lebih daripada bantuan elektronik yang misinya memantau dan mengagihkan kuasa kepada roda, dengan mengambil kira pembolehubah seperti anjakan gear, sudut stereng, nisbah hanyut, daya G dan maklumat lain yang datang daripada penderia yang turut dikongsi oleh ESP dan modul kawalan cengkaman.Maklumat itu dianalisis dalam milisaat sekali gus membolehkan sistem vektorisasi tork menghantar dan mengurus secara automatik dengan tepat dan hanya dalam seperseratus saat, tork yang diperlukan oleh roda belakang luar, menjadikan kereta berpusing lebih pantas. Tetapi bukan sahaja bergantung kepada sistem motor, kerumitan tindakan sistem vektorisasi binari berbeza dalam fungsinya.
Sistem pemvektoran tork terkini memanfaatkan maklumat daripada penderia ABS dan ESP (yang mengukur kelajuan individu bagi setiap roda) dan mod operasinya bergantung terutamanya pada jenis daya tarikan yang dimiliki kenderaan.
Dalam kenderaan pacuan roda hadapan
Sistem pemvektoran tork disepadukan dalam kawalan cengkaman, iaitu, pengagihan tork yang tidak simetri mengambil kira semua parameter yang disebutkan tetapi akhirnya ia hanya bertindak apabila kawalan cengkaman juga bertindak, menjadikan sebahagian daripada simulasi kunci, seolah-olah ia pembezaan mengunci diri.
Apabila kelajuan meningkat, sistem menggunakan parameter ESP untuk menilai parameter kestabilan kereta, menjadikan ESP campur tangan pada tahap brek secara bebas jika wajar.
Dalam kenderaan pacuan roda belakang
Sistem vektor berfungsi sebahagiannya dengan cara yang sama, seperti dalam kenderaan pacuan roda hadapan dan dalam kedua-dua kes, kenderaan dengan sistem pacuan dua roda dan sistem vektor tork tidak memerlukan pembezaan penguncian, dengan brek memainkan peranan mengehadkan putaran a roda yang diberi.Pada kenderaan pacuan semua roda
Pengendalian sistem pemvektoran tork sama sekali berbeza daripada kenderaan dengan hanya dua roda pemacu. Di sini, sistem bergantung terutamanya pada modul pacuan empat roda yang merupakan otak bagi operasi dan yang mengawal prestasi vektorisasi tork.
Dalam kenderaan pacuan semua roda, pengagihan daya tarikan antara gandar adalah bergantung sama ada pada cara mekanikal - pembezaan pusat - atau secara elektronik melalui klac berbilang cakera atau bahkan kedua-duanya, menjadikan sistem itu sendiri lebih kompleks.
Dalam kebanyakan kenderaan pacuan semua roda yang termasuk vektor tork, kedua-dua pembezaan hadapan dan belakang mempunyai cengkaman berbilang cakera pada setiap sisi gandar masing-masing supaya ia boleh mengubah tork yang digunakan. Dalam erti kata lain, sebagai tambahan kepada sistem pacuan semua roda yang menguruskan pembahagian tork antara gandar, sistem vektor tork juga boleh mengawal pengagihan tork antara roda.
Dalam amalan, sistem pacuan semua roda boleh berbeza antara gandar dan, bergantung pada sistem, dari 0 hingga 50% dan dari 0 hingga 100% tork. Walaupun sistem pemvektoran tork mampu berubah secara autonomi bersama-sama dengan pengagihan tork antara gandar, daya kilas dikenakan pada setiap roda, pada gandar hadapan ialah 50-50% dan dalam perkadaran dari 0 hingga 100% untuk gandar belakang.
Ini semua dalam masa nyata dan dalam pecahan sesaat, yang membolehkan pengurusan pemindahan tork yang lebih baik antara gandar, membantu mencapai daya tarikan yang lebih baik, sama ada dalam sokongan dinamik di selekoh, sama ada pada permukaan cengkaman rendah dan semuanya dengan penggunaan bahan api yang lebih baik. , memandangkan sistem ini mampu menguruskan daya tarikan dalam masa nyata, secara berterusan dan berubah-ubah menghantar tork yang diperlukan ke roda yang diperlukan, tanpa membazirkan sumber tenaga.
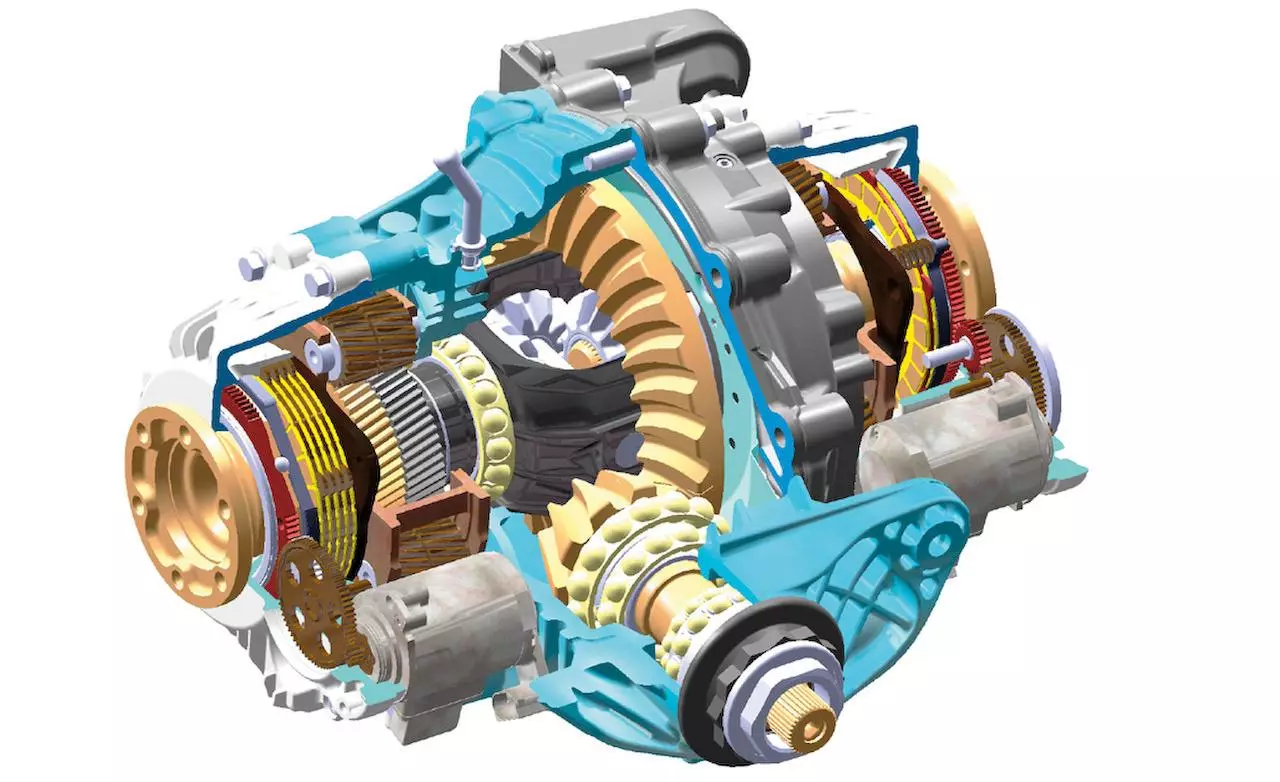
Perbezaan Belakang dengan Penvektoran Tork - BMW
Faedah memandangkan perbezaan yang menyekat diri
Dengan inovasi teknologi baru-baru ini yang diperkenalkan dalam sistem pevektoran tork, pembezaan penguncian sendiri menjadi semakin kurang digunakan, dengan responsif yang kurang, berat set yang lebih besar, penalti penggunaan dan lebih-lebih lagi batasan hanya mampu melakukan variasi daya tarikan antara roda hanya apabila satu daripada roda mempunyai putaran yang berlebihan berbanding dengan yang lain. Putaran yang berlebihan memaksa klac dalaman LSD dan set spring - geseran antara 2 komponen ini menentukan pengagihan tork antara dua roda supaya ia berputar dalam keadaan yang sama.
bentuk vektorisasi binari
Pembezaan menyekat diri boleh terdiri daripada tiga jenis: 1 hala, 1.5 hala dan 2 hala. Pembezaan kunci gelincir sama ada berfungsi dalam pecutan 1 hala sahaja, atau dalam pecutan 1.5 hala dan separuh nyahpecutan, atau dalam pecutan dan nyahpecutan 2 hala, sambil memastikan roda menerima sedikit 50% daya tarikan, sekali gus mengelakkan kelajuan berlebihan. salah satu roda tanpa daya tarikan. Sistem pemvektoran tork juga boleh bertindak pada kedua-dua pecutan dan nyahpecutan, tetapi dengan kelebihan mengubah atau malah memotong sepenuhnya tork yang dibekalkan kepada roda dengan putaran berlebihan.
Pada kenderaan pacuan dua roda yang memecut, vektor tork bertindak pada pembezaan seolah-olah ia adalah pembezaan terbuka. Pengagihan tork dilakukan secara simetri, tetapi dari saat terdapat variasi dalam daya tarikan atau kemasukan ke lengkung dengan perbezaan putaran yang berlebihan antara roda, sistem bertindak dengan menghantar tork ke roda dengan daya tarikan yang lebih besar, bertindak bersama-sama dengan kawalan cengkaman dan ESP . Semasa nyahpecutan, kerana tiada perbezaan pada gandar pemanduan yang lain, ESP bertanggungjawab untuk bertindak pada brek roda secara bebas, menguruskan maklumat yang dihantar kepadanya oleh semua penderia.
Dalam sistem pacuan empat roda terbaharu, sistem vektor tork memainkan peranan yang lebih menonjol, bertindak bersama-sama dengan semua sistem, tetapi dikawal oleh modul pengurusan pacuan empat roda pusat. Modul ini, sebagai tambahan kepada menguruskan daya tarikan antara gandar, juga menguruskan cara di mana vektorisasi tork bertindak dalam pecutan dan nyahpecutan, menghantar tork dalam cara autonomi sepenuhnya ke salah satu roda, juga bergantung pada sistem kawalan cengkaman. dan ESP untuk situasi yang paling ekstrem.
Operasi PTV pada Porsche Macan: