
Za posledných dvadsať rokov sa trakčné systémy veľmi vyvinuli. No dnes už nestačí len prenášať alebo obmedzovať pohyb kolies. Hlavným heslom je distribúcia efektívne a diskrétne.
Myšlienka systémov binárna vektorizácia má poskytnúť každému kolesu presne taký výkon, aký potrebuje, v ideálnom čase pre efektívny výkon. Koncept nemôže byť jednoduchší, ale vzhľadom na elektronickú zložitosť systémov, ktoré ho tvoria, je veľmi zložitý.
Ako funguje binárne vektorovanie?
Vektorovanie krútiaceho momentu nie je nič iné ako elektronická pomôcka, ktorej poslaním je monitorovať a rozdeľovať výkon na kolesá, berúc do úvahy premenné, ako je radenie, uhol natočenia volantu, driftový pomer, G sily a ďalšie informácie pochádzajúce zo snímačov, ktoré zdieľa aj ESP. a moduly kontroly trakcie.Informácie sa analyzujú v milisekúndách, čo umožňuje systému vektorizácie krútiaceho momentu automaticky odosielať a riadiť presne a v priebehu jednej stotiny sekundy krútiaci moment požadovaný vonkajším zadným kolesom, vďaka čomu sa vozidlo otáča rýchlejšie. Ale nielen v závislosti od motorického systému, zložitosť pôsobenia binárneho vektorizačného systému sa líši v jeho funkciách.
Najnovšie systémy vektorovania krútiaceho momentu využívajú informácie zo senzorov ABS a ESP (ktoré merajú individuálnu rýchlosť každého kolesa) a ich režim činnosti závisí predovšetkým od typu trakcie vozidla.
Vo vozidlách s pohonom predných kolies
Systém vektorovania krútiaceho momentu je integrovaný v trakčnej kontrole, to znamená, že asymetrická distribúcia krútiaceho momentu zohľadňuje všetky spomínané parametre, ale v konečnom dôsledku pôsobí len vtedy, keď pôsobí aj trakčná kontrola, čím je súčasťou simulácie blokovania, ako keby samosvorný diferenciál.
Keď sa rýchlosť zvýši, systém použije parametre ESP na vyhodnotenie parametrov stability vozidla, vďaka čomu ESP zasiahne na úrovni bŕzd nezávisle, ak je to opodstatnené.
Vo vozidlách s pohonom zadných kolies
Systém vektorovania funguje čiastočne rovnakým spôsobom ako vo vozidlách s predným náhonom a v oboch prípadoch vozidlá so systémom pohonu dvoch kolies a systémom vektorovania krútiaceho momentu nevyžadujú uzávierkové diferenciály, pričom brzdy zohrávajú úlohu obmedzovania otáčania motora. dané koleso.Na vozidlách s pohonom všetkých kolies
Činnosť systému vektorovania krútiaceho momentu je úplne odlišná od vozidiel s iba dvoma hnacími kolesami. Tu je systém závislý predovšetkým od modulu pohonu všetkých štyroch kolies, ktorý je mozgom operácií a ktorý riadi výkon vektorizácie krútiaceho momentu.
Vo vozidlách s pohonom všetkých kolies je distribúcia trakcie medzi nápravami závislá buď od mechanických prostriedkov – centrálny diferenciál – alebo elektronicky prostredníctvom viackotúčových spojok alebo dokonca od oboch, čím je samotný systém ešte zložitejší.
Vo väčšine vozidiel s pohonom všetkých kolies, ktoré zahŕňajú vektorovanie krútiaceho momentu, majú predný aj zadný diferenciál viackotúčové spojky na každej strane príslušnej nápravy, aby mohli meniť aplikovaný krútiaci moment. Inými slovami, okrem systému pohonu všetkých kolies spravujúceho deľbu krútiaceho momentu medzi nápravy dokáže systém vektorovania krútiaceho momentu riadiť aj distribúciu krútiaceho momentu medzi kolesá.
V praxi sa systém pohonu všetkých kolies môže meniť medzi nápravami a v závislosti od systému od 0 do 50 % a od 0 do 100 % krútiaceho momentu. Zatiaľ čo systém vektorovania krútiaceho momentu sa dokáže autonómne meniť spolu s rozdelením krútiaceho momentu medzi nápravy, krútiaci moment aplikovaný na každé koleso na prednú nápravu je 50 – 50 % a na zadnú nápravu v pomere od 0 do 100 %.
To všetko v reálnom čase a v zlomkoch sekúnd, čo umožňuje lepšie riadenie prenosu krútiaceho momentu medzi nápravami, čo pomáha dosiahnuť lepšiu trakciu, či už pri dynamickej podpore v zákrutách, či už na povrchoch s nízkou priľnavosťou a to všetko so zlepšenou spotrebou paliva. , keďže systém je schopný riadiť trakciu v reálnom čase a nepretržite a variabilne posielať potrebný krútiaci moment na potrebné kolesá bez plytvania energetickými zdrojmi.
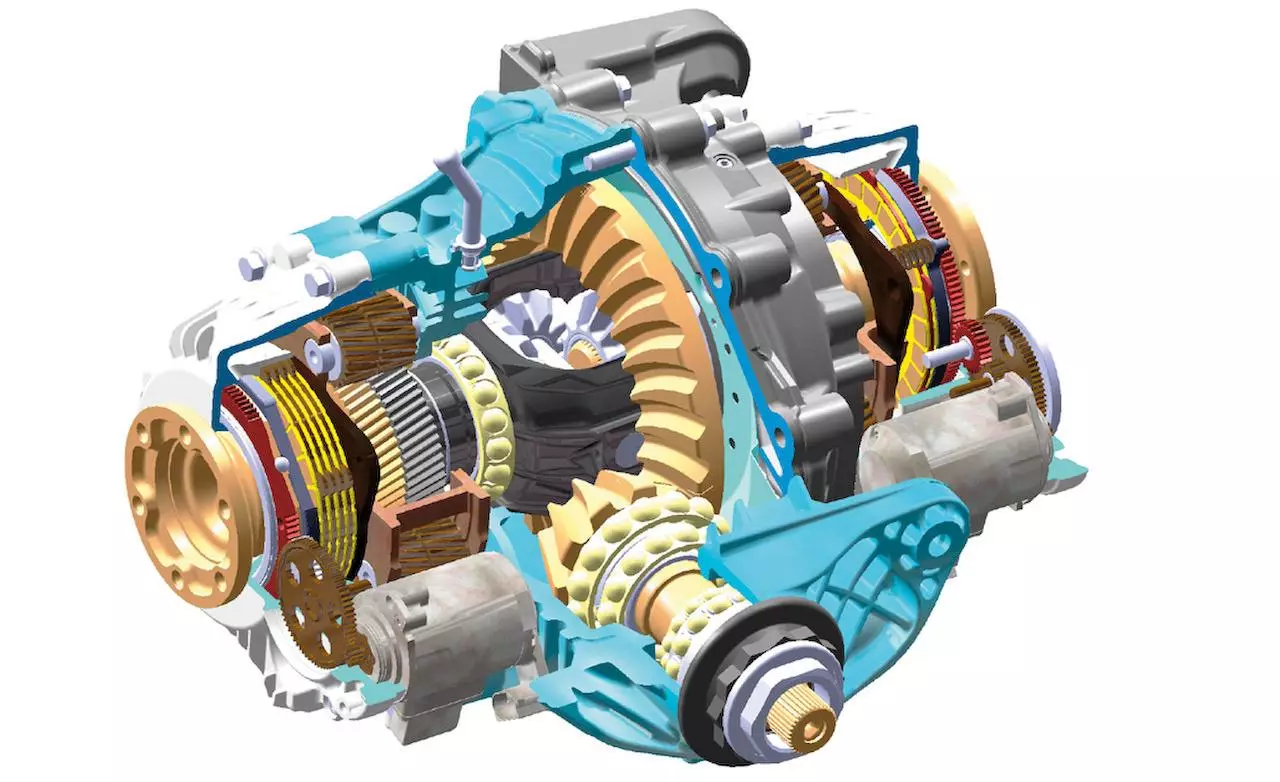
Zadný diferenciál s vektorovaním krútiaceho momentu - BMW
Výhody vzhľadom na samosvorné diferenciály
S nedávnymi technologickými inováciami zavedenými v systémoch vektorovania krútiaceho momentu sa samosvorné diferenciály čoraz menej používajú, s menšou odozvou, vyššou hmotnosťou súpravy, znížením spotreby a predovšetkým obmedzením schopnosti meniť trakciu iba medzi kolesami. iba vtedy, keď sa jedno z kolies nadmerne otáča v porovnaní s druhým. Nadmerné otáčanie núti vnútornú spojku LSD a súpravu pružín – trenie medzi týmito 2 komponentmi určuje rozdelenie krútiaceho momentu medzi dve kolesá tak, aby sa otáčali za rovnakých podmienok.
Tvary binárna vektorizácia
Samoblokovacie diferenciály môžu byť troch typov: 1-cestný, 1,5-cestný a 2-cestný. Slip-lock diferenciály fungujú buď len v 1-smernom zrýchlení, alebo v 1,5-smernom zrýchlení a polovičnom spomalení, alebo v 2-smernom zrýchlení a spomalení, pričom zaisťujú, že kolesá dostanú len 50 % trakcie, čím sa zabráni prekročeniu rýchlosti. jedného z kolies bez trakcie. Systémy vektorovania krútiaceho momentu môžu tiež pôsobiť na zrýchlenie aj spomalenie, ale s výhodou menenia alebo dokonca úplného prerušenia krútiaceho momentu dodávaného na koleso nadmernou rotáciou.
Pri zrýchľovaní vozidiel s pohonom dvoch kolies pôsobí vektorovanie krútiaceho momentu na diferenciál, ako keby to bol otvorený diferenciál. Rozdelenie krútiaceho momentu sa vykonáva symetricky, ale od momentu, keď dôjde k zmenám v priľnavosti alebo vjazdu do zákrut s nadmerným rozdielom otáčania medzi kolesami, systém pôsobí tak, že posiela krútiaci moment na koleso s vyššou trakciou, pričom pôsobí spolu s kontrolou trakcie a ESP. . Počas spomaľovania, keďže na druhej hnacej náprave nie je žiadny diferenciál, je ESP zodpovedný za nezávislé pôsobenie na brzdy kolies a spravuje informácie, ktoré mu posielajú všetky snímače.
V najnovších systémoch pohonu všetkých štyroch kolies hrá systém vektorovania krútiaceho momentu ešte významnejšiu úlohu, funguje spoločne so všetkými systémami, ale riadi ho centrálny modul riadenia pohonu všetkých štyroch kolies. Tento modul okrem riadenia medzinápravovej trakcie riadi aj spôsob, akým pôsobí vektorizácia krútiaceho momentu pri zrýchľovaní aj spomaľovaní, pričom krútiaci moment posiela úplne autonómne na jedno z kolies, pričom počíta aj so systémami kontroly trakcie. a ESP pre najextrémnejšie situácie.
Prevádzka PTV na Porsche Macan: