
ระบบบังคับเลี้ยวแบบแอ็คทีฟสำหรับเพลาล้อหลังที่รวมเข้ากับระบบบังคับเลี้ยวของรถ ทำให้มียานพาหนะมากขึ้นเรื่อยๆ: ตั้งแต่ Porsche 911 GT3/RS ไปจนถึง Ferrari 812 Superfast หรือแม้แต่ Renault Mégane RS รุ่นล่าสุด
ระบบเหล่านี้ไม่ใช่เรื่องใหม่ ตั้งแต่ระบบบังคับเลี้ยวแบบพาสซีฟรุ่นแรกไปจนถึงระบบแอ็คทีฟล่าสุด เส้นทางของการพัฒนาและการควบคุมต้นทุนของเทคโนโลยีนี้ใช้เวลานาน แต่ ZF ได้พัฒนาสิ่งที่จะเป็นระบบบังคับเลี้ยวแบบแอ็คทีฟระบบแรกในการติดตั้งยานพาหนะที่ใช้งานจริงอย่างครอบคลุม
เมื่อพิจารณาจากแบรนด์ ผู้ผลิตชิ้นส่วนรถยนต์ที่ได้รับรางวัลมากที่สุดแห่งหนึ่งของโลก (ครองตำแหน่ง 8 ปีติดต่อกันในปี 2015) ZF ได้ปฏิวัติระบบบังคับเลี้ยวแบบแอ็คทีฟสำหรับเพลาล้อหลังด้วยวิวัฒนาการตามธรรมชาติของระบบเดิมที่มีราคาถูกกว่าและซับซ้อนน้อยกว่า

ระบบบังคับเลี้ยวของ ZF ประกอบด้วยอะไรบ้าง?
นอกจากคำย่อและศัพท์เฉพาะ เราจะเห็นหลายยี่ห้อใช้พื้นฐานของระบบบังคับเลี้ยวของ ZF ซึ่งเรียกภายในว่า AKC (Active Kinematics Control) จากแบรนด์สู่แบรนด์จะเปลี่ยนชื่อแต่จะเป็นระบบเดียวกัน
ชื่อที่ ZF ตั้งให้นั้นทำให้เราได้เบาะแสที่ดีเกี่ยวกับธรรมชาติของระบบนี้ จากการควบคุมแรงจลนศาสตร์ เราสามารถอนุมานได้ทันทีว่าระบบทำงานเกี่ยวกับแรงของการเคลื่อนไหว แต่เราไม่ต้องการพูดถึงประเด็นของฟิสิกส์ประยุกต์หรือพื้นฐานของกลศาสตร์คลาสสิก โปรดอย่า…
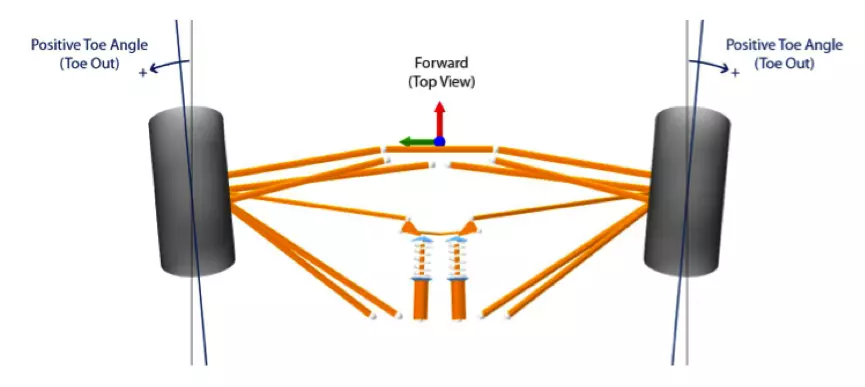
ระบบนี้ควบคุมโดยโมดูลควบคุม (ECS) ซึ่งมีหน้าที่จัดการอย่างแข็งขัน ผ่านพารามิเตอร์ที่ได้รับจากเซ็นเซอร์ความเร็ว มุมล้อ และการเคลื่อนที่ของพวงมาลัย ฟังก์ชันทั้งหมดนี้ทำงานโดยเปลี่ยนมุมโทอินที่ล้อหลัง
ความแปรผันเดียวกันนี้ในมุมของการบรรจบกันของล้อหลังสามารถเปลี่ยนแปลงได้ถึง 3 องศาระหว่างรูปแบบเชิงบวกและเชิงลบ นั่นคือ ด้วยมุมลบ ล้อที่เห็นจากด้านบนมีการจัดตำแหน่งนูนเป็นรูปตัว V โดยที่จุดยอดของ V เดียวกันนี้แสดงมุมที่ 0 ° โดยฉายการเปิดล้อออกไปด้านนอก ตรงกันข้ามจะเกิดขึ้นที่มุมบวก โดยที่ตำแหน่งล้อเข้าที่ของล้อสร้าง Λ โดยฉายมุมล้อเข้าด้านใน
ระบบ ZF AKC จัดการเปลี่ยนมุม toe-in บนล้อเพลาหลังได้อย่างไร?
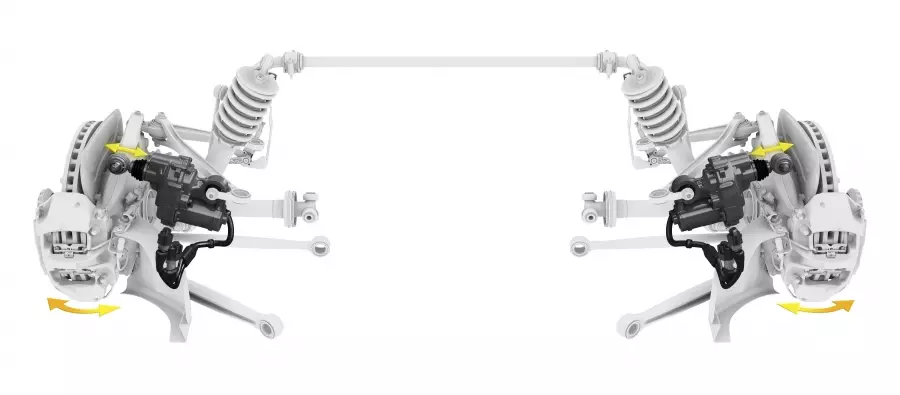
เช่นเดียวกับระบบในอดีต ทุกระบบใช้ตัวกระตุ้นแบบไฮดรอลิกหรือแบบไฟฟ้า-ไฮดรอลิก ZF เป็นแบบไฟฟ้าไฮดรอลิกและมีรูปแบบที่แตกต่างกันสองรูปแบบ: หรือ as แอคชูเอเตอร์กลางหรือคู่ . ในกรณีของรถยนต์สมรรถนะสูง แอคทูเอเตอร์ไฟฟ้าไฮดรอลิกที่วางอยู่บนช่วงล่างของแต่ละล้อจะถูกนำมาใช้
อันที่จริง เมื่อยานพาหนะติดตั้งแอคทูเอเตอร์คู่ พวกเขาจะแทนที่แขนช่วงล่างส่วนบน โดยที่แขนเชื่อมขวางอีกอันหนึ่งจะรวมเข้ากับต้นแขน การทำงานของแอคทูเอเตอร์จะตอบสนองโดยตรงกับอินพุตจากโมดูลควบคุม ECS ซึ่งในแบบเรียลไทม์จะเปลี่ยนแปลงมุมของการบรรจบกันของล้อเพลาหลัง
ระบบ ZF AKC ทำงานอย่างไร
ดังที่ได้กล่าวไปแล้ว อินพุตที่เราให้กับพวงมาลัย มุมเลี้ยวของล้อหน้า และความเร็ว ช่วยให้โมดูลควบคุม ECS กำหนดความผันแปรของระบบบังคับเลี้ยวแบบแอ็คทีฟได้ ในทางปฏิบัติ ที่ความเร็วต่ำหรือในการจอดรถ ระบบบังคับเลี้ยวแบบแอ็คทีฟจะเปลี่ยนมุมของล้อหลังไปในทิศทางตรงกันข้ามกับด้านหน้า ทำให้มุมเลี้ยวลดลงและนิยมจอดรถแบบขนาน
เมื่อขับด้วยความเร็วสูงขึ้น (จาก 60 กม./ชม.) ระบบบังคับเลี้ยวแบบแอ็คทีฟช่วยให้เข้าโค้งได้อย่างมีเสถียรภาพมากขึ้น ในขั้นตอนนี้ล้อหลังจะหมุนไปในทิศทางเดียวกับล้อหน้า
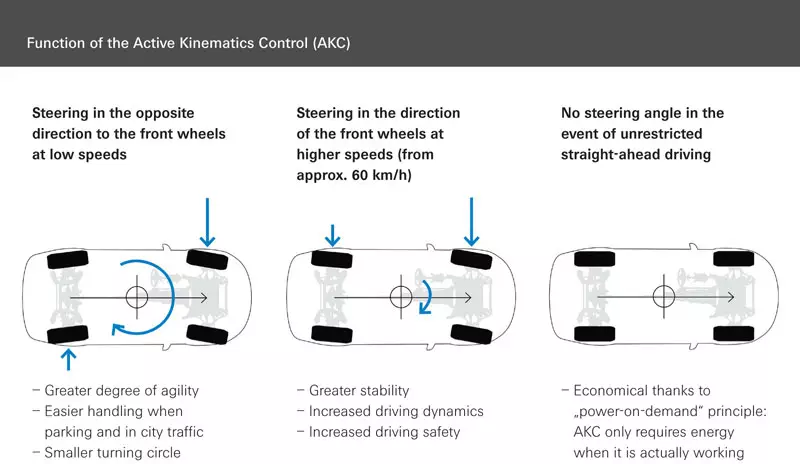
เมื่อรถขับเคลื่อนโดยไม่มีการเคลื่อนไหวของพวงมาลัย โมดูลควบคุมจะถือว่าไม่ได้ใช้งานโดยอัตโนมัติ ซึ่งจะช่วยประหยัดพลังงาน อันที่จริง ระบบบังคับเลี้ยวแบบแอ็คทีฟของ ZF คือระบบ "พวงมาลัยแบบออนดีมานด์" แต่ยังเป็นระบบ "เปิดเครื่องตามความต้องการ" ด้วย
ZF ใช้เวลาหลายปีในการทำให้ระบบบังคับเลี้ยวแบบแอคทีฟนี้เป็นประชาธิปไตย และปอร์เช่เป็นหนึ่งในผู้ผลิตรายแรกๆ ที่ประกอบระบบบังคับเลี้ยวแบบแอ็คทีฟรุ่นใหม่นี้เป็นซีรีส์ในปี 2014 ในปี 2015 หลังจากหนึ่งปีของระบบเติบโตเต็มที่ เฟอร์รารีก็เดินตามเส้นทางเดียวกัน ในอนาคตอาจเป็นรุ่นสปอร์ตเกือบทั้งหมด เนื่องจากความเข้ากันได้ของโซลูชันทางเทคนิคที่ ZF พัฒนาขึ้น