
За последние двадцать лет тяговые системы сильно изменились. Но сегодня передачи или ограничения движения колес недостаточно. Распространять его эффективно и осмотрительно - вот лозунг.
Идея систем двоичная векторизация он должен дать каждому колесу именно ту мощность, которая ему нужна, в идеальное время для эффективной работы. Идея не может быть проще, но она очень сложна, учитывая электронную сложность составляющих ее систем.
Как работает двоичная векторизация?
Вектор крутящего момента - это не что иное, как электронный помощник, задача которого - контролировать и распределять мощность по колесам, принимая во внимание такие переменные, как переключение передач, угол поворота, коэффициент дрейфа, силы G и другую информацию, поступающую от датчиков, которые также используются ESP. и модули контроля тяги.Информация анализируется в миллисекундах, что позволяет системе векторизации крутящего момента автоматически отправлять и точно управлять крутящим моментом, требуемым внешним задним колесом, всего за одну сотую секунды, заставляя автомобиль поворачиваться быстрее. Но не только в зависимости от двигательной системы, сложность действия двоичной системы векторизации различается по ее функциям.
Новейшие системы векторизации крутящего момента используют информацию от датчиков ABS и ESP (которые измеряют индивидуальную скорость каждого колеса), и их режим работы зависит, прежде всего, от типа тяги автомобиля.
В переднеприводных автомобилях
Система векторизации крутящего момента интегрирована в противобуксовочную систему, то есть асимметричное распределение крутящего момента учитывает все упомянутые параметры, но в конечном итоге оно действует только тогда, когда противобуксовочная система также действует, делая часть моделирования блокировки, как если бы она была самоблокирующийся дифференциал.
Когда скорость увеличивается, система использует параметры ESP для оценки параметров устойчивости автомобиля, заставляя ESP независимо вмешиваться на уровне тормозов, если это оправдано.
В заднеприводных автомобилях
Система векторизации работает частично так же, как и в автомобилях с передним приводом, и в обоих случаях автомобили с системами привода на два колеса и системами векторизации крутящего момента не требуют блокировки дифференциалов, а тормоза играют роль ограничения поворота автомобиля. данное колесо.На полноприводных автомобилях
Система векторизации крутящего момента полностью отличается от работы автомобилей с двумя ведущими колесами. Здесь система зависит, прежде всего, от модуля полного привода, который является мозгом операций и управляет производительностью векторизации крутящего момента.
В полноприводных автомобилях распределение тяги между осями зависит либо от механических средств - центрального дифференциала, либо от электроники через многодисковые муфты или даже от обоих, что делает саму систему еще более сложной.
В большинстве полноприводных автомобилей, которые включают в себя векторизацию крутящего момента, как передний, так и задний дифференциалы имеют многодисковые муфты на каждой стороне соответствующей оси, чтобы они могли изменять прилагаемый крутящий момент. Другими словами, в дополнение к системе полного привода, управляющей разделением крутящего момента между осями, система векторизации крутящего момента также может управлять распределением крутящего момента между колесами.
На практике система полного привода может варьироваться между осями и, в зависимости от системы, от 0 до 50% и от 0 до 100% крутящего момента. Хотя система векторизации крутящего момента может изменяться автономно вместе с распределением крутящего момента между осями, крутящий момент, прилагаемый к каждому колесу, на передней оси составляет 50-50% и в пропорции от 0 до 100% для задней оси.
Все это происходит в режиме реального времени и за доли секунды, что позволяет лучше управлять передачей крутящего момента между осями, помогая достичь лучшего сцепления с дорогой, будь то динамическая поддержка в поворотах, будь то на поверхностях с низким сцеплением, и все это с улучшенным расходом топлива. , поскольку система способна управлять тягой в реальном времени, непрерывно и переменно посылая необходимый крутящий момент на необходимые колеса, не тратя зря энергоресурсы.
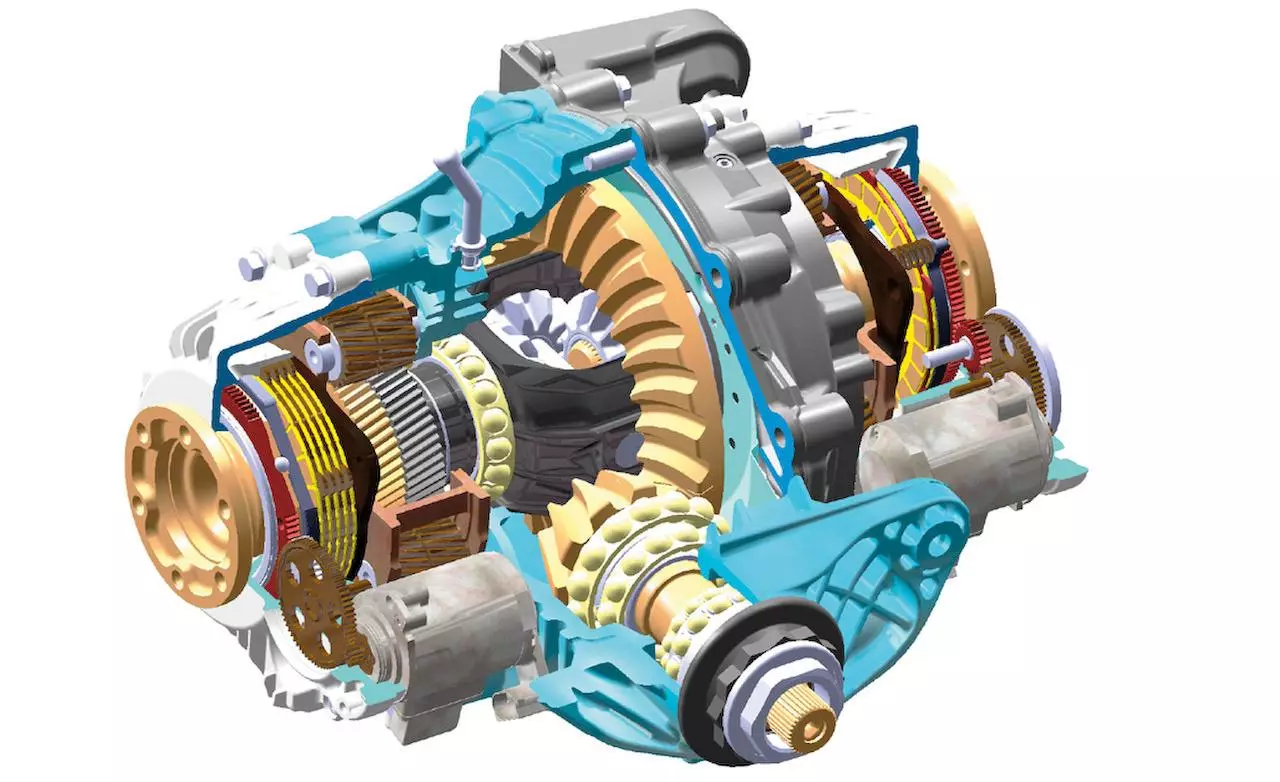
Задний дифференциал с вектором крутящего момента - BMW
Преимущества с учетом самоблокирующихся дифференциалов
С последними технологическими инновациями, внедренными в системы управления крутящим моментом, самоблокирующиеся дифференциалы используются все реже и реже, с меньшей отзывчивостью, большим весом комплекта, снижением расхода и, прежде всего, ограничением только возможности изменять тягу между колесами. только когда одно из колес слишком сильно вращается по сравнению с другим. Чрезмерное вращение заставляет внутреннюю муфту LSD и пружинный блок - трение между этими двумя компонентами определяет распределение крутящего момента между двумя колесами, так что они вращаются в равных условиях.
Формы двоичная векторизация
Самоблокирующиеся дифференциалы бывают трех типов: 1-ходовые, 1,5-ходовые и 2-ходовые. Дифференциалы с блокировкой скольжения работают либо в режиме одностороннего ускорения, либо в режиме полуторастороннего ускорения и половинного замедления, либо в режиме двухстороннего ускорения и замедления, при этом гарантируя, что колеса незначительно получают 50% тяги, предотвращая превышение скорости. одного из колес без тяги. Системы векторизации крутящего момента также могут воздействовать как на ускорение, так и на замедление, но с преимуществом изменения или даже полного отключения крутящего момента, подаваемого на колесо при избыточном вращении.
При ускорении полноприводных автомобилей векторизация крутящего момента действует на дифференциал, как если бы это был открытый дифференциал. Распределение крутящего момента выполняется симметрично, но с момента, когда есть изменения тяги или вхождения в повороты с чрезмерной разницей вращения между колесами, система действует, передавая крутящий момент на колесо с большей тягой, действуя вместе с контролем тяги и ESP. . Во время замедления, поскольку на другой ведущей оси нет дифференциала, ESP отвечает за независимые действия на колесные тормоза, управляя информацией, отправляемой ей всеми датчиками.
В самых последних полноприводных системах система векторизации крутящего момента играет еще более важную роль, действуя вместе со всеми системами, но управляемая центральным модулем управления полным приводом. Этот модуль, помимо управления тяговым усилием между осями, также управляет тем, как векторизация крутящего момента действует как при ускорении, так и при замедлении, передавая крутящий момент полностью автономным образом на одно из колес, также полагаясь на системы контроля тяги. и ESP для самых экстремальных ситуаций.
Работа PTV на Porsche Macan: