
Viimeisten kahdenkymmenen vuoden aikana vetojärjestelmät ovat kehittyneet paljon. Mutta nykyään pyörän liikkeen välittäminen tai rajoittaminen ei riitä. Levitä se tehokkaasti ja harkiten on avainsana.
Ajatus järjestelmistä binäärinen vektorointi se antaa jokaiselle pyörälle juuri sen tarvitseman tehon, ihanteellisena ajankohtana tehokkaan suorituskyvyn saavuttamiseksi. Konsepti ei voisi olla yksinkertaisempi, mutta se on syvästi monimutkainen ottaen huomioon sen sisältävien järjestelmien elektronisen monimutkaisuuden.
Kuinka binäärinen vektorointi toimii?
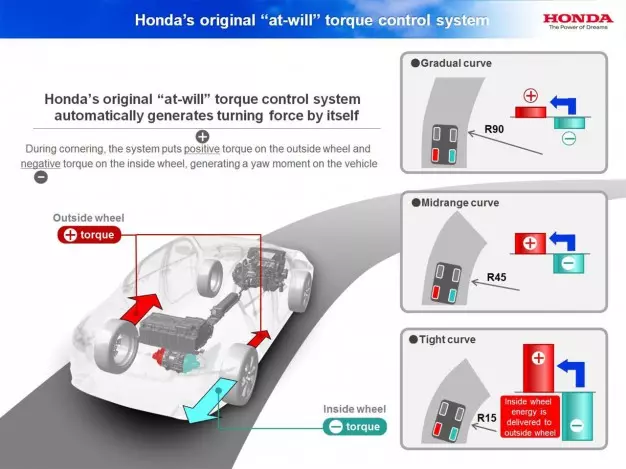
Vääntömomenttivektori ei ole muuta kuin elektroninen apuväline, jonka tehtävänä on valvoa ja jakaa voimaa pyörille, ottaen huomioon muuttujat, kuten vaihteenvaihto, ohjauskulma, ryömintäsuhde, G-voimat ja muut antureista tulevat tiedot, jotka myös ESP jakaa. ja luistonestomoduulit.Tiedot analysoidaan millisekunteina, jolloin vääntömomentin vektorointijärjestelmä voi automaattisesti lähettää ja hallita tarkasti ja vain sadasosassa sekuntia ulomman takapyörän vaatiman vääntömomentin, mikä saa auton kääntymään nopeammin. Mutta ei vain moottorijärjestelmästä riippuen, binaarisen vektorointijärjestelmän toiminnan monimutkaisuus vaihtelee sen toiminnoissa.
Uusimmat vääntömomentin vektorijärjestelmät hyödyntävät ABS- ja ESP-antureiden tietoja (jotka mittaavat kunkin pyörän yksilöllistä nopeutta) ja niiden toimintatapa riippuu ennen kaikkea ajoneuvon vetovoimasta.
Etuvetoisissa ajoneuvoissa
Vääntömomentin vektorijärjestelmä on integroitu luistonestojärjestelmään, eli vääntömomentin epäsymmetrinen jakautuminen ottaa huomioon kaikki mainitut parametrit, mutta lopulta se toimii vain silloin, kun myös luistonesto toimii, mikä on osa lukon simulaatiota, ikään kuin se olisi itselukkiutuva tasauspyörästö.
Kun nopeus kasvaa, järjestelmä käyttää ESP-parametreja arvioidakseen auton vakausparametreja, jolloin ESP puuttuu jarrujen tasoon itsenäisesti, jos se on perusteltua.
Takavetoisissa ajoneuvoissa
Vektorijärjestelmä toimii osittain samalla tavalla kuin etuvetoisissa ajoneuvoissa, ja molemmissa tapauksissa ajoneuvot, joissa on kaksipyörävetojärjestelmä ja vääntömomenttivektorijärjestelmä, eivät vaadi tasauspyörästön lukitsemista, vaan jarrut rajoittavat pyörän pyörimistä. annettu pyörä.Nelivetoisissa ajoneuvoissa
Vääntömomenttivektorijärjestelmän toiminta eroaa täysin ajoneuvoista, joissa on vain kaksi vetopyörää. Tässä järjestelmä riippuu ennen kaikkea nelivetomoduulista, joka on toimintojen aivot ja joka ohjaa vääntömomentin vektoroinnin suorituskykyä.
Nelivetoisissa ajoneuvoissa vetovoiman jakautuminen akseleiden välillä riippuu joko mekaanisista välineistä – keskitasauspyörästöön – tai elektronisesti monilevykytkimien tai jopa molempien kautta, mikä tekee itse järjestelmästä vieläkin monimutkaisemman.
Useimmissa nelivetoisissa ajoneuvoissa, joissa on vääntömomenttivektori, sekä etu- että takatasauspyörästöissä on monilevykytkimet kunkin akselin kummallakin puolella, jotta ne voivat vaihdella kohdistettua vääntömomenttia. Toisin sanoen, vääntömomentin akselien välistä jakoa hallitsevan nelivetojärjestelmän lisäksi vääntömomentin vektorijärjestelmä pystyy ohjaamaan myös vääntömomentin jakautumista pyörien välillä.
Käytännössä nelivetojärjestelmä voi vaihdella akseleiden välillä ja järjestelmästä riippuen 0-50 % ja 0-100 % vääntömomentista. Vääntömomentin vektorijärjestelmä voi vaihdella itsenäisesti yhdessä vääntömomentin jakautumisen kanssa akselien välillä, mutta jokaiseen pyörään kohdistuva vääntömomentti on etuakselilla 50-50 % ja suhteessa 0-100 % taka-akseliin.
Tämä kaikki tapahtuu reaaliajassa ja sekunnin murto-osissa, mikä mahdollistaa paremman vääntömomentin siirron hallinnan akseleiden välillä, mikä auttaa saavuttamaan paremman pidon, olipa kyseessä dynaaminen tuki mutkissa, vähäpitoisilla pinnoilla ja kaikki paremmalla polttoaineenkulutuksella , koska järjestelmä pystyy hallitsemaan pitoa reaaliajassa, jatkuvasti ja vaihtelevasti lähettäen tarvittavan vääntömomentin tarvittaville pyörille tuhlaamatta energiaresursseja.
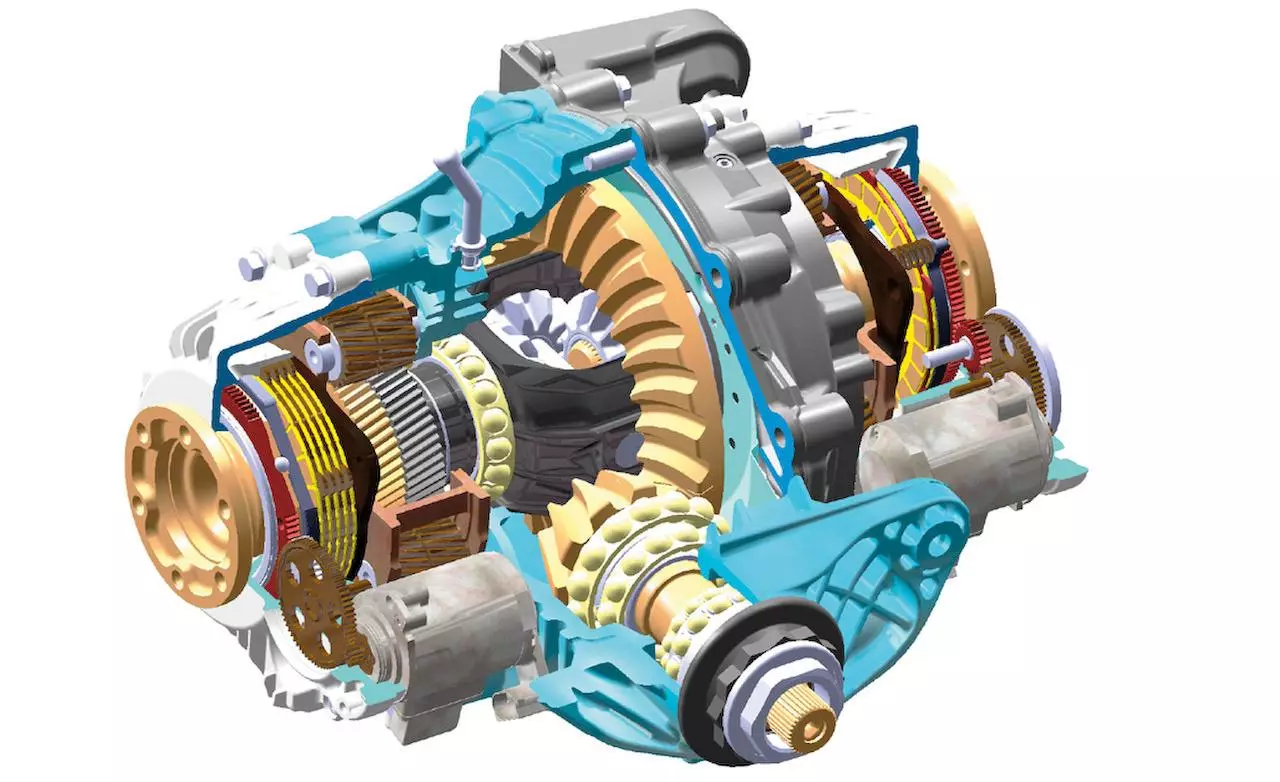
Taka-tasauspyörästö vääntömomentin vektoroinnilla - BMW
Edut itselukkiutuvien erojen vuoksi
Viimeaikaisten vääntömomentin vektorijärjestelmissä käyttöön otettujen teknisten innovaatioiden myötä itselukkiutuvia tasauspyörästöjä käytetään yhä vähemmän, ja niiden reagointikyky heikkenee, sarjan paino kasvaa, kulutus vähenee ja ennen kaikkea rajoitukset, jotka koskevat vain pitoa pyörien välillä. vain silloin, kun toinen pyörä pyörii liikaa toiseen verrattuna. Liiallinen pyöriminen pakottaa LSD:n sisäisen kytkimen ja jousisarjan – näiden kahden komponentin välinen kitka määrää vääntömomentin jakautumisen kahden pyörän välillä siten, että ne pyörivät tasaisissa olosuhteissa.
Muodot binäärinen vektorointi
Itselukkiutuvia tasauspyörästöjä voi olla kolmea tyyppiä: 1-tie, 1,5-tie ja 2-tie. Slip-lock tasauspyörästö toimii joko vain 1-suuntaisessa kiihdytyksessä tai 1,5-suuntaisessa kiihdytyksessä ja puolihidastuksessa tai 2-suuntaisessa kiihtyvyydessä ja hidastumisessa varmistaen samalla, että pyörät saavat vain vähän 50 % vetovoimasta, mikä estää ylinopeuden. yhdestä pyörästä ilman pitoa. Vääntömomenttivektorijärjestelmät voivat myös vaikuttaa sekä kiihtyvyyteen että hidastumiseen, mutta sen etuna on vaihdella tai jopa katkaista pyörään syötetty vääntömomentti liiallisella pyörimisellä.
Kiihdytetyissä kaksipyöräisissä ajoneuvoissa vääntömomenttivektori vaikuttaa tasauspyörästöyn ikään kuin se olisi avoin tasauspyörästö. Vääntömomentin jakautuminen tapahtuu symmetrisesti, mutta siitä hetkestä lähtien, kun vetovoimassa on vaihteluita tai kun pyörien välillä on suuria pyörimiseroja, järjestelmä toimii lähettämällä vääntömomenttia suuremman vetovoiman omaavalle pyörälle, toimien yhdessä pidon ja ESP:n kanssa. . Hidastuksen aikana, koska toisella vetävällä akselilla ei ole tasauspyörästöä, ESP on vastuussa pyörien jarrujen toimimisesta itsenäisesti ja hallitsee kaikkien antureiden sille lähettämiä tietoja.
Uusimmissa nelivetojärjestelmissä vääntömomentin vektorijärjestelmällä on vieläkin näkyvämpi rooli, joka toimii yhdessä kaikkien järjestelmien kanssa, mutta sitä ohjaa keskusnelivetohallintamoduuli. Tämä moduuli hallitsee akseleiden välisen vetovoiman lisäksi myös tapaa, jolla vääntömomentin vektorointi toimii sekä kiihdytyksessä että hidastumisessa, lähettäen vääntömomentin täysin itsenäisesti yhdelle pyörästä, ottaen huomioon myös luistonestojärjestelmät. ja ESP äärimmäisimpiin tilanteisiin.
PTV:n toiminta Porsche Macanissa: